发一个新帖,谈谈运动控制中编码器定位精度的问题。 点击:16853 | 回复:200







发表于:2013-01-03 11:52:02
162楼
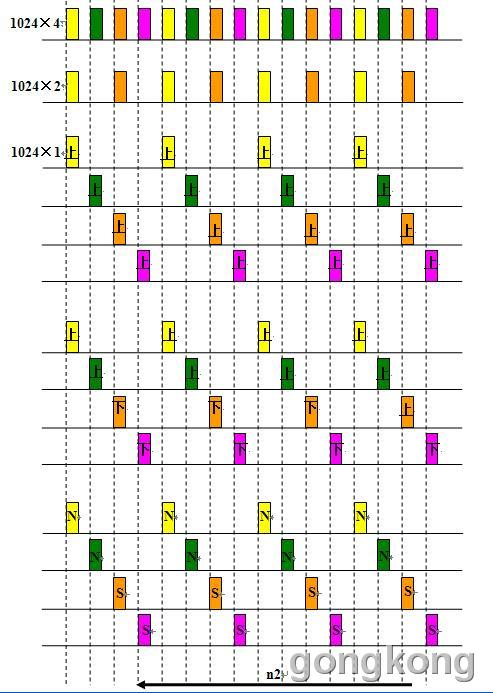
1、这是我说的,一个编码器,可以输出三个均匀的不同解析度的脉冲数;
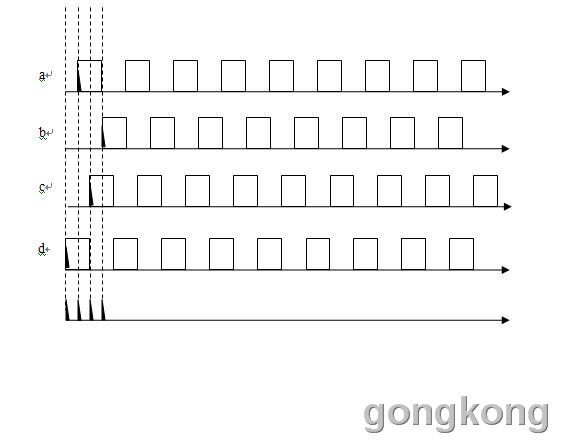
2、其原理就是有4条完全相同的刻线,彼此落后90°而已;
3、正余弦编码器,虽是两条相同磁迹线,如果把一条N、S磁迹线分成一条N、一条S,那就是4条刻线;
4、这就是4的来历!
-----------------------------------
老劉 能否告訴我 你這是哪個國家做的編碼器
不管是光電 磁性 或其他方式做成的編碼器 有帶原點都是兩組刻線 沒帶原點就一刻線 前者有三個光耦合( 類似霍耳元件) 而行成 Z ,A B, A, B
方波可4倍頻 正是利用AB相 的相位差夠成的4倍頻 絕非你講的4刻線(況且你的方波的頻寬也畫錯 是180度 不是90度) 你在主樓貼的圖 是CT的 Smart Driver 也就是內置運動控制模組的驅動器 所以最高4倍頻 也可2倍頻 更可1倍頻
你所位4條刻線的編碼器 那叫長線驅動編碼器(Line Driver) 也就是A, /A , B, /B 這也是上講的2刻線構成 /A 是由A分出 兩個剛好反相 B 亦是如此 這樣做的目的 抗干擾能力強
3、正余弦编码器,虽是两条相同磁迹线,如果把一条N、S磁迹线分成一条N、一条S,那就是4条刻线;
--------------------------
你151樓貼的圖的左下編的波形 才是正余弦輸出的1Vpp(波峰 波底的電壓差 1V)波形 竟被你改成"磁迹线" 真的不知道你的依據是什麼?????
151樓貼的圖叫做主隨跟從MAP架構圖 方波的接口來自主軸(變頻虛擬軸) 弦波來自CT自己的伺服軸(從軸)而16的圖所累加起來就是我們講的Mapping 當然 N越多此系統的精度越高
此MAP 包括位置 包括線速度 傳統做法就是建立表格



发表于:2013-01-03 14:27:11
171楼
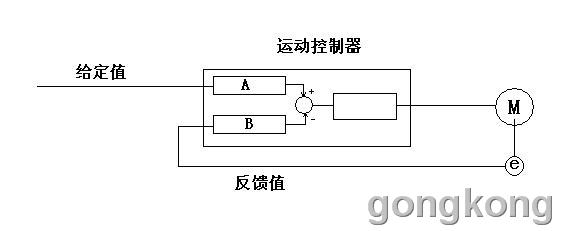
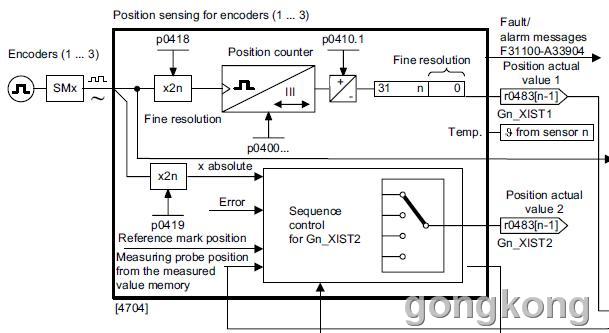
引用 刘志斌 的回复内容: 引用 东山脚下-骑士军团 的回复内容:这就是典型的闭环控制系统的基本原理 1、这就是典型的闭环控制系统的基本原理 ;2、通常我们说编码器的刻线数,是指一条刻线的刻线数,例如说,这个编码器的刻线数是1024;3、那我们会马上意识到,这个编码器的解析度最大就是1024×4=4096;4、我们还会知道,这个编码器周反馈脉冲数有三种可以由用户选用1024、2048、4096;5、这个图中有两个计数器,一个是编码器反馈脉冲的计数器,也是伺服当前实际位置的计数器,即图中Free-running position counter,他的读数就是伺服当前的实际位置;6、另一个计数器就是最右边的N0.of signal period,这个计数器就是指令脉冲计数器,用户输入的指令脉冲数就储存在这个计数器中,伺服运行中,它的读数就是距离目标控制位置或者简单说距离终点的指令脉冲数;7、这两个计数器的读数是互补的,就是说他们的读数的和,等于伺服运行全程的指令脉冲数;
这个图就是用AB正交的增量式编码器的应用框图,不是按照你的四条刻线编码器来设计的嘛!
这个图就是用AB正交的增量式编码器的应用框图,不是按照你的四条刻线编码器来设计的嘛!

 .多多的跟帖~~~~
.多多的跟帖~~~~热门招聘
相关主题
- 怎么样根据伺服电机的扭力惯...
 [6942]
[6942] - 交流伺服电机能不能当普通电...[5699]
- 两台伺服电机高速同步问题[6332]
- PLC走X,Y 轴直线圆弧插补好...[6006]
- 3~5年内直线电机不会有明确的...[6565]
- 脉冲频率来控制速度,那么速度...[15465]
- 关于同步伺服电机堵转的疑问[7161]
- 伺服电机的输出线可以用屏蔽...[11209]
- 伺服控制技术中的死区及死区...[5420]
- CNC G0定位速度是什么?[5424]

官方公众号

智造工程师
-

 客服
客服

-

 小程序
小程序

-

 公众号
公众号











 工控网智造工程师好文精选
工控网智造工程师好文精选
