发一个新帖,谈谈运动控制中编码器定位精度的问题。 点击:17022 | 回复:200












记录的数据是-----前对齐-----的。。。。转一周都记录ffffH,比如,增量型编码器1024线,四倍频4096.。。。。那么,计数单元里面的数字,变化为(最前面转速单元先忽略):0000H0000H,0010H0000H,0020H0000H,0030H0000H,0040H0000H,0050H0000H,0060H0000H,.。。。。。。。。FFF0H0000H,
可以看到,当使用1024线编码器时,只有前面3位中的数据在变化,。。。类似为小数点后面三位的精度。。。因为FFFH=4095。所以只要前三位数就足够了。。。
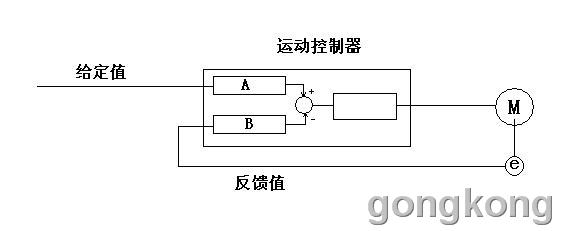
从而可以看出,系统的精度,完全依赖于编码器的精度,A单元,是给定数据,你可以随意给定位置,比如你可以给定12345678H,但是,如果使用上面的1024线的编码器,编码器所能反馈的最精确的位置只能是:12300000H,或者12400000H,这就是设备理论上所能达到的最精确的位置,再也精确不了了。。。。
由此可以得出结论,理论上一个控制系统,在其它控制功能完全不变的情况下,只要提高了编码器的反馈精度,整个系统的精度,就会增加。
这样,任何编码器的反馈数据,都可以整合到这个单元里面。供控制系统使用。。这样,就把控制系统和反馈系统分开,各自开发各自的,各自开发精度提高后,总的精度也就提高了。而不用针对新的编码器重新编制程序。。


这个系统就如同偶厂使用最广泛的PID控制器相似,从偶工作中看一个PID控制系统中,精度最差的不是传感测量这部分而是执行这一块,控制器精度可以做的很高,反馈变松精度也很好,但这个执行就很难说了因为其是与工艺负荷连接最密封的部分,即小能量的信号精度我们现在做的可以,但大能量的负荷控制我们做的不好。
楼主介绍的伺服电机控制系统,偶也是这样认为,控制器精度很高,编码器精度也可以,因此这个系统最精度最差的就是执行这一块,所以偶感觉提高编码器精度虽然能够提高伺服电机的精度可是不如提高执行器的精度效果好。当然但从控制器这一块看信号变松反馈的精度比不如控制器精度高。
对:jiaoanpeng——王者之师关于这个系统就如同偶厂使用最广泛的PID控制器相似,从偶工作中看一个PID控制系统中,精度最差的不是传感测量这部分而是执行这一块,控制器精度可以做的很高,反馈变松精度也很好,但这个执行就很难说了因为其是与工艺负荷连接最密封的部分,即小能量的信号精度我们现在做的可以,但大能量的负荷控制我们做的不好。楼主介绍的伺服电机控制系统,偶也是这样认为,控制器精度很高,编码器精度也可以,因此这个系统最精度最差的就是执行这一块,所以偶感觉提高编码器精度虽然能够提高伺服电机的精度可是不如提高执行器的精度效果好。当然但从控制器这一块看信号变松反馈的精度比不如控制器精度高。内容的回复:
你没看懂我在说什么。。。


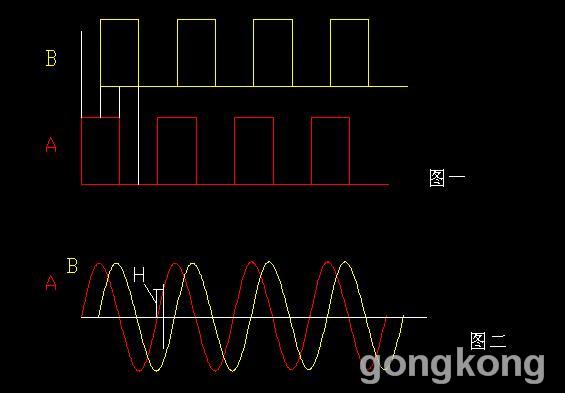
我画这个图时,我也想是写个变频器,还是写个控制器。。。后来想,写个控制器吧。。。主要想说明的意思就是,各种编码器,包括增量式,sincos式,绝对位置式,甚至是多圈式编码器,数据反馈到运动控制器内部的数据格式,到底是什么样的。。。。因为,不专门干这个的一般不会接触到,比如,安川变频器,接一块编码器卡,PG-X3,使用者只是按照要求,设置一下参数,但是,编码器数据进变频器里以后,变频器如何使用它进行运算,它是一个什么样的数据格式。。是16位的,还是8位的。我想说明的就是这个意思,这个不涉及机械方面的精度,假设机械方面是理想化的。
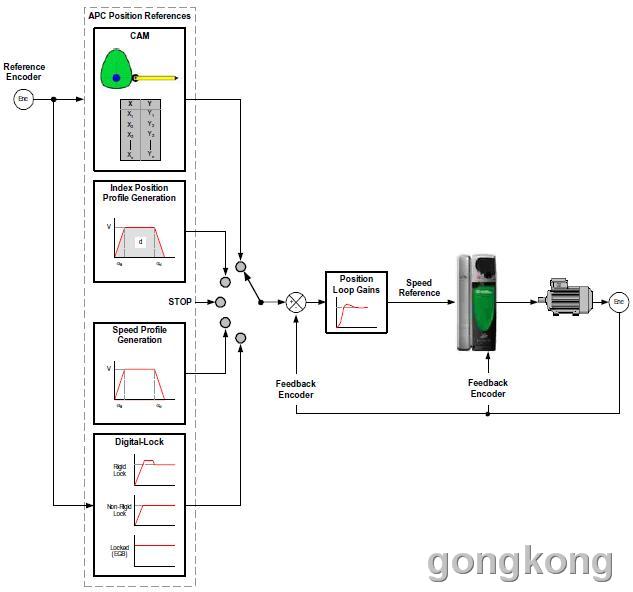
这个未必只是CT的架构,这个估计是一种标准架构,我觉得这种架构很科学。。。这种架构,可以把运控开发和编码器开发分开来,各干各的。。。。运控做好了,不管编码器什么规格,什么型号,拿来就可以用,而不必修改控制程序,而且,只要编码器分辨率足够,运控的精度也就会足够。。。
回复内容:
对:jiaoanpeng——王者之师关于这个系统就如同偶厂使用最广泛的PID控制器相似,从偶工作中看一个PID控制系统中,精度最差的不是传感测量这部分而是执行这一块,控制器精度可以做的很高,反馈变松精度也很好,但这个执行就很难说了因为其是与工艺负荷连接最密封的部分,即小能量的信号精度我们现在做的可以,但大能量的负荷控制我们做的不好。楼主介绍的伺服电机控制系统,偶也是这样认为,控制器精度很高,编码器精度也可以,因此这个系统最精度最差的就是执行这一块,所以偶感觉提高编码器精度虽然能够提高伺服电机的精度可是不如提高执行器的精度效果好。当然但从控制器这一块看信号变松反馈的精度比不如控制器精度高。内容的回复:
有些道理!
所以有的驱动器或上位系统里都有齿轮间隙补偿等功能和参数,但是改进执行机构的精度是很难的,并且执行机构存在磨损等,运行段时间后都需要校正。
从精度上来讲,电气控制精度都满足了,目前的短板还是在执行等机械机构上。
这个问题在数控机床上表现的很突出,高精度的数控机床国内做不了,电气上有原因,但主要还是机械结构、刀具等做不了。
http://www.tudou.com/programs/view/1Y70LVe8tag/
http://www.tudou.com/programs/view/vGozGEwhZJ8/
德国DMG数控机床的视频, 用的是西门子的数控系统
记得有人已经发过了!
简单的运动控制,如飞剪等在驱动器上可以实现,复杂的运动控制还是要靠上位系统,驱动器只能实现一些简单的东西。
我记得一些多轴同步、电子凸轮等的应用,在西门子的产品中是simotion 系列实现的。
至于多轴联动、插补等复杂的运动控制,是有SINUMERIK数控系统实现的。
- 怎么样根据伺服电机的扭力惯...
 [6942]
[6942] - 交流伺服电机能不能当普通电...[5699]
- 两台伺服电机高速同步问题[6332]
- PLC走X,Y 轴直线圆弧插补好...[6006]
- 3~5年内直线电机不会有明确的...[6565]
- 脉冲频率来控制速度,那么速度...[15465]
- 关于同步伺服电机堵转的疑问[7161]
- 伺服电机的输出线可以用屏蔽...[11209]
- 伺服控制技术中的死区及死区...[5420]
- CNC G0定位速度是什么?[5424]

官方公众号

智造工程师
-

 客服
客服

-

 小程序
小程序

-

 公众号
公众号











 工控网智造工程师好文精选
工控网智造工程师好文精选
