发一个新帖,谈谈运动控制中编码器定位精度的问题。 点击:16987 | 回复:200







你的那个图片的资料有么??给一个链接地址吧??


4、极性不同的4个脉冲,必须经过反相电路,变成极性一致,这种变换的结果就有延迟时差,远没有4条刻线产生的4个脉冲标准、电路简单;
5、这些都无关紧要,紧要的是4个脉冲叠加,在征得解释里,变成“multiplication by hardware …x 2^n, … 表示的是硬件对AB信号进行倍频, 即细分。对光电编码器就是4倍频, 即n = 2。”
6、编码器出来,就有4个叠加脉冲输出,与“multiplication by hardware ”乘法器毫不相干;
7、之所以说错话,不仅是对编码器不懂,而且是对“multiplication by hardware …x 2^n”不懂,不知道“multiplication by hardware …x 2^n”用在什么地方;
引用 征 的回复内容:
…… 还是费点功夫简单讲解一下,
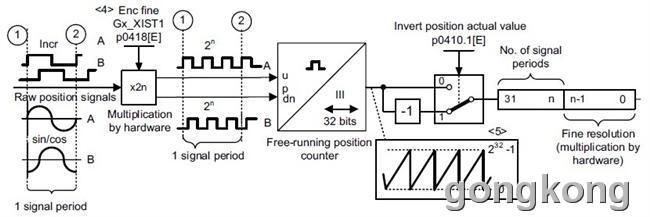
以光电编码器为例:1) 左侧的 1 2 图 表示的1 signal period , 表示的是光电编码器的一线输出的AB信号。光电编码器有多少线, 其旋转一周就输出多少个这样的脉冲。
……2)multiplication by hardware …x 2^n, … 表示的是硬件对AB信号进行倍频, 即细分。对光电编码器就是4倍频, 即n = 2。 光电编码器的AB一个周期即1 signal period 经硬件4倍频后得到4个脉冲,…
3)中间的1 2 表示1 signal period 四倍频后得到的信号
4)Free-running position counter 表示的是位置计数器 ……
5) P0410.1 是配置参数, …
6) 最右侧32位的计数值部分 4)中的计数器对4倍频后的脉冲计数,一个脉冲一个脉冲进行记录, Fine resolution 部分: 对4倍频的光电编码器而言,这个位域占用两位
实际的计数过程如下:
电机转动时,
1)中的信号高低高低的连续变化,
经2)硬件4倍频后, 得到一系列的边沿检测后输出(即硬件4倍频)的脉冲信号3),
这些脉冲由4)的计数器自动从最低位加减计数。最后得到一个计数值。
如果对这个计数值分析, 低2位表示细分的信号, 2~31位表示的编码器的原始信号。
但请注意一点, 2~31的数值是由计数器对倍频的信号自动累加得来的,这一部分表示电机转过的线数。
对1024线编码器, 计数范围最大为 2^30/1024 = 1048576 圈,如果电机以3000rpm转动, 保证电机转动1048576/3000 = 349.… 分钟, 即大于这么长的时间后计数器翻转, 自动从0开始计数
在位置控制时, 需要的是这个32位计数器的整体数值,不会区分那一部分。 …
1、以上是征的发言;
2、下面链接我的发言,大家对照,看看
http://bbs.gongkong.com/Details/201301/2013010118502000001-1.shtml



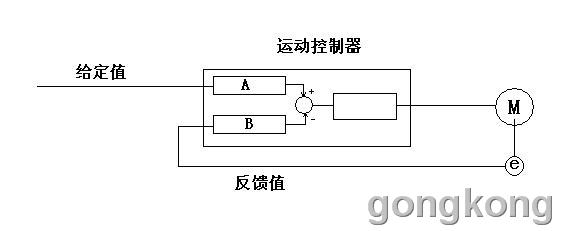
引用 东山脚下-骑士军团 的回复内容:这就是典型的闭环控制系统的基本原理
1、这就是典型的闭环控制系统的基本原理 ;
2、通常我们说编码器的刻线数,是指一条刻线的刻线数,例如说,这个编码器的刻线数是1024;
3、那我们会马上意识到,这个编码器的解析度最大就是1024×4=4096;
4、我们还会知道,这个编码器周反馈脉冲数有三种可以由用户选用1024、2048、4096;
5、这个图中有两个计数器,一个是编码器反馈脉冲的计数器,也是伺服当前实际位置的计数器,即图中Free-running position counter,他的读数就是伺服当前的实际位置;
6、另一个计数器就是最右边的N0.of signal period,这个计数器就是指令脉冲计数器,用户输入的指令脉冲数就储存在这个计数器中,伺服运行中,它的读数就是距离目标控制位置或者简单说距离终点的指令脉冲数;
7、这两个计数器的读数是互补的,就是说他们的读数的和,等于伺服运行全程的指令脉冲数;
- 怎么样根据伺服电机的扭力惯...
 [6942]
[6942] - 交流伺服电机能不能当普通电...[5699]
- 两台伺服电机高速同步问题[6332]
- PLC走X,Y 轴直线圆弧插补好...[6006]
- 3~5年内直线电机不会有明确的...[6565]
- 脉冲频率来控制速度,那么速度...[15465]
- 关于同步伺服电机堵转的疑问[7161]
- 伺服电机的输出线可以用屏蔽...[11209]
- 伺服控制技术中的死区及死区...[5420]
- CNC G0定位速度是什么?[5424]

官方公众号

智造工程师
-

 客服
客服

-

 小程序
小程序

-

 公众号
公众号











 工控网智造工程师好文精选
工控网智造工程师好文精选
