正运动技术的运动控制器中同步运动的电子齿轮功能是怎么实现的? 点击:635 | 回复:2

电子齿轮功能用于两个轴的连接,将主轴与从轴按照一个常数齿轮比建立连接,不需要物理齿轮,使用指令直接设置电子齿轮的比值,由于是使用软件实现的,故电子齿轮比可以随时更改。
电子齿轮功能通过指令CONNECT、CONNPATH实现,将一个轴按照一定比例连接到另一个轴上做跟随运动,一条运动指令就能驱动两个电机的运行,通过对这两个电机轴移动量的检测,将位移偏差反馈到控制器并获得同步补偿,这样能使两个轴之间的位移偏差量控制在精度允许范围内。
电子齿轮连接的是脉冲个数,例如主从轴连接比例为1:5,给主轴发送1个脉冲,此时对应给从轴发送5个脉冲。
CONNPATH与CONNECT的相同点:二者的使用语法相同,连接的都是脉冲个数,CONNPATH连接到单个轴的运动的效果与CONNECT相同。
CONNPATH与CONNECT的区别:CONNECT连接的是单个轴的目标位置。CONNPATH是连接的是插补轴的矢量长度,此时需要连接在插补运动的主轴上,连接到插补从轴上无法跟随插补运动。CONNPATH会跟踪XY轴插补的的矢量长度变化,而不是跟踪单独的X轴或者Y轴。
语法:CONNECT/CONNPATH(比率,被连接轴) AXIS(连接轴)
电子齿轮的连接比率:比率可正可负,可为小数,连接的是脉冲个数,要考虑不同轴UNITS的比例。
比率可以通过重复调用CONNECT/CONNPATH指令动态变化(连接成功后保持连接状态),取消连接时用CANCEL或RAPIDSTOP指令。
假设连接轴0的UNITS为10,被连接轴1的UNITS为100,使用CONNECT连接,比率ratio为1,CONNECT(1,1) AXIS(0)
当轴1运动S1=100时,轴0运动S0=S1*UNITS(1)*ratio/UNITS(0)=100*100*1/10,此时运动1000。
例子:
RAPIDSTOP(2)
WAIT IDLE(0)
WAIT IDLE(1)
BASE(0,1)
ATYPE=1,1
UNITS=10,100
DPOS=0,0
SPEED=100,100
ACCEL=1000,1000
DECEL=1000,1000
SRAMP=100,100
TRIGGER '自动触发示波器
MOVE(100) AXIS(1) '轴1运动100,此时轴0不动
WAIT IDLE(1) '上一段运动不连接
DELAY(10) '延时10ms
CONNECT(0.5,1) AXIS(0) '轴0连接到轴1,比例为0.5
MOVE(100) AXIS(1) '轴1运动100,轴0运动500
轴0目标位置:DPOS(0)=DPOS(1)*UNITS(1)*ratio/UNITS(0)=100*100*0.5/10=500
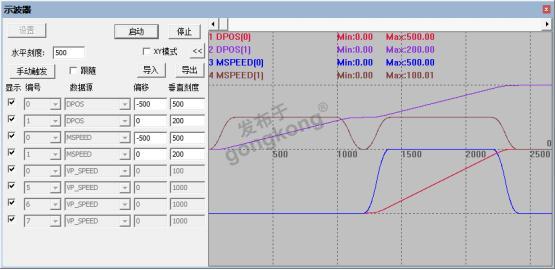
电子齿轮运行波形图





楼主最近还看过

- 谈谈伺服电机的功率、转矩、电...
 [29767]
[29767] - 求助:脉冲发生器怎样驱动步进...[9041]
- 松下伺服驱动器MDDA103A1A说...[7575]
- 脉冲的占空比对步进电机的影...[9057]
- 求助:伺服电机失控飞车[6901]
- RESOLVER与编码器[7990]
- 请教;步进电机驱动器的作用[6747]
- 枕式包装机从轴跟随主轴同步...[6659]
- Windows系统下的实时性问题[8045]
- 伺服电机断电后为什么还那么...[9041]

官方公众号

智造工程师
-

 客服
客服

-

 小程序
小程序

-

 公众号
公众号











 工控网智造工程师好文精选
工控网智造工程师好文精选
