(感应异步电动机上)“转矩”与“转速”的因果关系 点击:13585 | 回复:319






楼主最近还看过
假设刘志斌的曲线是以“电机转矩”为自变量;以电机“转速”为因变量,的这一相互关系的 “函数”;再假如刘志斌的“(异步)电机是先有了转矩才有的转速,转矩是因速度是果”这一“学说”成立。而从刘志斌的曲线上可以看出:自变量(动力转矩)在函数定义域内的“零转矩”所对应的曲线上的点的转速量值是“同步转速”。
则:
根据刘志斌关于感应异步 “电机是先有了转矩才有的转速,转矩是因,速度是果”可以推出:刘志斌认为感应异步电动机先有了这个“零转矩”才导致原本不是“同步转速”的电机转速变化为“同步转速”的,“零转矩”是因,“同步转速”为果。
然而,《物理学》和大量的客观事实都告诉我们:“零转矩”是决不可能改变物体的“转动速度”的!
即:客观事实证伪了刘志斌关于感应异步 “电机先有了转矩才有的速度,转矩是因,速度是果”这一“学说”是彻头彻尾的谬论!
见《物理学》的“动量矩定理”:
转动物体所受的冲量矩等于这段时间内转动物体动量矩的增量。

引用 wanggq 的回复内容:
针对20楼 刘志斌的“2、你的冲床、剪板机的电机的速度在不断变化,电机速度变化是什么原因引起的?” 这一疑问,本人做出如下回复: 冲床、剪板机的速度不断变化及其拖动电机的速度不断变化都是电机转矩与负荷转矩相互作用而引起的! ……
1、我问wanggq :“你的冲床、剪板机的电机的速度在不断变化,电机速度变化是什么原因引起的?”
2、 wanggq回答: 冲床、剪板机的速度不断变化及其拖动电机的速度不断变化都是电机转矩与负荷转矩相互作用而引起的! ……
3、电机的速度不同,电机的转矩不同,在电机机械特性曲线上,我们可以看到电机速度降低时,电机的转矩是增大的;
4、电机拖动负载运行时,电机的速度决定于负载的大小,负载越重电机转速越低,负载越轻电机转速越高;
5、由于有了3、4条,电机总能拖动负载稳定运行在某一速度上;
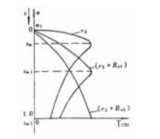
15、关于异步电机机械特性曲线:
异步电动机的机械特性
机械特性是异步电动机的主要特性,它是指电动机的转速n2与电磁转矩Tem之间的关系,即n2=f(Tem)。用s坐标替换成转速n2的坐标就成如图3—22所示的三相异步电动机的机械特性曲线。
一、机械特性分析
机械特性的曲线被Tm分成两个性质不同的区域,即AB段和BC段。
当电动机起动时,只要起动转矩TQ大于反抗力矩TL,电动机便转动起来。电磁转矩Tem的变化
沿曲线BC段运行。随着转速的上升,BC段中的Tem一直增大,所以转子一直被加速使电动机很快越
过CB段而进入AB 段,在AB段随着转速上升,电磁转速下降。当转速上升某一定值时,电磁转矩
Tem与反抗转矩TL相等,此时,转速不再上升,电动机就稳定运行在AB段,所以BC段称为不稳定区,AB段称为稳定区。

图3—22 三相异步电动机的机械特性曲线
电动机一般都工作在稳定区域AB段上,在这区域里,负载转矩变化时,异步电动机的转速变化不大,电动机转速随转矩的增加而略有下降,这种机械特性称为硬特性。三相异步电动机的这种硬特性很适用于一般金属切削机床。
我在6月9日就贴出过如下这个内容:
我对电机使用说明书指的“静负荷”和“动负荷”是这样理解的:
“静负荷”是负载没有明显“角加速度”时对动力所呈现出的“反抗转矩”。也可以理解成负载的角速度没有急速改变的前提下对电机呈现的“反抗转矩”。
“动负荷”是负载“角速度”在电机输出的“动力转矩”作用下急速提高的情形下对电机呈现出了在原有“不加速转动”之负荷基础上再加上由于加速而额外多出的“反抗转矩”,两部分叠加起来的负荷。
牛顿第三定律是作用力和反作用力同时产生,同时消失。作用力和反作用力作用在同一直线上,大小相等,方向相反。
这“动力转矩”和“反抗转矩”的关系跟作用力与反作用力的关系相似,是一个道理。“反抗转矩”与“动力转矩”同时产生同时消失,“反抗转矩”和“动力转矩”作用在同一转轴上,大小相等,方向相反。
设备在其动力转矩拖动下转动,总是要产生一个“反抗转矩”与“动力转矩”相抗衡。(这是根据牛顿第三定律得出的结论)
所以,电机的转速不是由电机一方单独决定的。电机的“转矩对转速的函数曲线”其横坐标是电机的“转速”,而不是“时间”。它不是电机的“转矩对时间的函数曲线”,也就不能象刘老师那样单从“转矩对转速的函数”曲线上某段的斜率来判断电机是否“很快进入稳定工作区”!
我在6月9日就贴出过如下这个内容:
对机械的平动运动有牛顿第二定律:
物体的“加速度”与物体受到的合外力成正比,与物体的“质量”成反比。 或者说,物体质量与加速度的乘积等于其受到的合外力的大小。
F=m α
与此对应,对机械的转动有“转动定律”:
M=I β
( M :转动物体所受到的合外力矩 I :转动物体的“转动惯量” β :转动物体的“角加速度” )
从中我们可以看出:飞轮加速转动是需要(在“静负荷”基础上再额外)占用动力转矩的。对飞轮要求越快的加速,飞轮就会对拖动电机呈现越重的“反抗转矩”,对拖动电机来说,它就负担了越重的负荷。
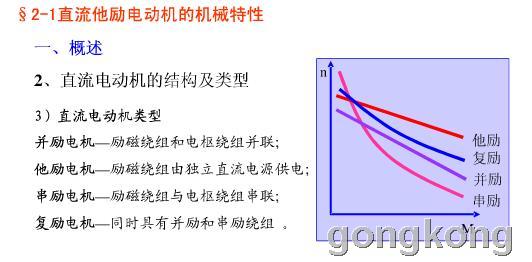
这个主题帖的题目是《(感应异步电动机上)“转矩”与“转速”的因果关系》,刘志斌习惯性的东拉西扯的张冠李戴,把其它类型的电动机特性拿到这里来说事。混淆事实真象!影响低水平网友的判断甄别。
直流电动机上的转矩与转速的因果关系与感应异步电动机上的转矩与转速的关系是不同的。
直流电动机上是先有“转矩”,而后有“转速”,因它是由电源给转子绕组提供电流的。
而感应异步电动机上是先有“转差”,而后有“转矩”(也可以通俗的理解为:先有转速,而后有转矩),“转速”是因,“转矩”是果!因为转子绕组中的感应电流是“转差”的结果。没有感应电流就不会有转矩,这一点与直流电机有天壤之别!
直流电动机定子磁场相对于定子是静止的,不同于交流感应异步电动机的旋转磁场!
所以,直流电机转子电流的存在不依赖于转速的存在。但是,转子绕组中的电流大小受“转速”快慢影响。
直流电动机的转速越快,转子绕组中的感应电势就越高,而交流感应异步电动机的转速(在零速度至同步转速内)越快,转子绕组中的感应电势就越低;
直流电动机转子绕组中的感应电势方向是与外施电压的方向相反的。所以,这个感应电势又称为“反电势”。反电势越高,转子绕组中的电流就越小。故,转速越高,其转矩就越小。
直流电动机转子绕组中的感应电势是阻碍转子绕组电流通过的“反电势”
交流感应异步电动机转子绕组中的感应电势是推动转子电流通过的“感生电源”
- 软起动实现电机正、反转控制功...
 [1092]
[1092] - 关于工控机上的软驱改造心得[1150]
- [转贴]六款主流视频会议软件...[1305]
- s7-200plc在组态王中的数据读...[1866]
- 求助,WINCC flexible连接以太...[1563]
- 请教各位高手:基恩士PLC打开...[4791]
- 中国工控网第500,000个注册用...[5299]
- 全世界懂中文的人都会回的一...[1553]
- S7-200 PLC EM231模拟量输入...[1941]
- 根据滚珠丝杠相关参数如何求...[1373]

官方公众号

智造工程师
-

 客服
客服

-

 小程序
小程序

-

 公众号
公众号











 工控网智造工程师好文精选
工控网智造工程师好文精选
