基于TRIZ理论创新设计采摘执行器 点击:108 | 回复:0

发表于:2021-07-09 10:06:37
楼主
针对采摘执行器在采摘过程中无法控制采摘压力导致水果受损的问题,设计一种基于TRIZ的矛盾冲突理论和物场模型的采摘执行器。
研究目的与方法:
为提高果类在适宜采收期内的采摘效率,各种类型的水果辅助采摘机械应运而生,而这些采摘机械中的核心部件是末端执行器。末端执行器是水果采摘机械中完成水果抓取功能的组件,具体包括定位、抓取、采摘和复位等动作的执行,但市面上常用的简易型采摘器所配置的末端执行器多是靠人力控制以实现功能,其自动化程度低,采摘耗时耗力。针对现有采摘执行器在采摘过程因无法控制水果采摘压力导致水果易损伤的问题,应用TRIZ矛盾冲突理论和物场模型分析方法进行采摘执行器的创新设计。

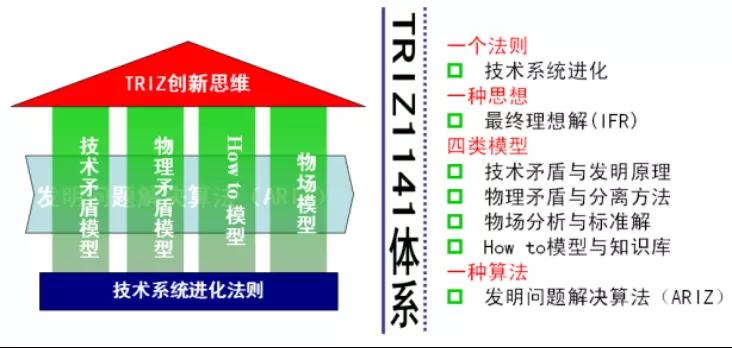
通过TRIZ系统组件分析和功能模型进行问题分析,找出采摘执行器的有效功能和不足功能;运用TRIZ的技术冲突理论、物理冲突理论以及物场模型分析得出各种解决方案,经综合比较,最终运用分割原理方案实现执行器的压力可控且安装简易,运用空间分离原理实现执行器爪头自动扭转。新型的力度可控执行器在压力传感器和电机的相互配合下实现水果的无损自动抓取和采摘。
研究结果与结论:
1、综合应用TRIZ矛盾冲突理论和物场分析模型方法,设计了基于TRIZ理论的新型采摘执行器。新型采摘执行器主要由爪头、爪座、传感器和电机等组成,且采摘压力可控。从而实现水果的无损自动抓取和采摘,同时适用于不同果品采摘作业。
2、对采摘执行器进行了运动仿真和试验验证,进一步证明了采摘执行器的稳定性和可靠性。试验结果表明采摘执行器的抓取压力为2.5 N时采摘效果最佳且水果无挤压损伤,在30 min的采摘试验中,平均每个水果的采摘时间约为6 s,采摘成功率为93%。试验表明,采摘执行器的采摘效率和成功率符合采摘创新设计要求,为后续采摘器的研究提供了理论参考依据。
1分不嫌少!
赏





楼主最近还看过
热门招聘
相关主题
- 湖南工厂设施布局问题精益改...
 [1107]
[1107] - 工业品企业该如何转型到线上...[994]
- 深圳塑料企业精益生产推行关...[460]
- 六西格玛管理方法名词解释[740]
- 制造型企业导入精益“136”模式...[480]
- 分享|自学TRIZ理论的最全书单...[719]
- 精益生产现场管理口诀,收藏,...[595]
- 某机械设备公司TPM管理改善方...[483]
- 北京服务行业实施六西格玛培...[550]
- 时至今日,六西格玛理论还实用...[967]

官方公众号

智造工程师
-

 客服
客服

-

 小程序
小程序

-

 公众号
公众号











 工控网智造工程师好文精选
工控网智造工程师好文精选
