PLC+伺服 精确定位的问题 点击:1231 | 回复:8






楼主最近还看过



发表于:2012-06-29 21:12:22
5楼
撇开PLC的定位功能不说,这样的系统大部分都是数学问题,而PLC只是将这些数学问题都封装了起来。
我提供给楼主一个经验处理方法,只要明白了其中的数学原理,这类问题都只是简单的重复
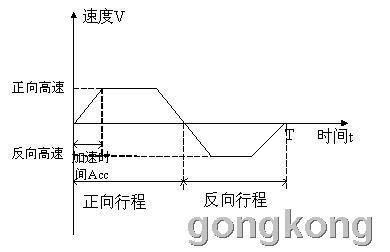
我就用这个曲线来解释这个脉冲分配问题,以及数学处理的思路。
实际在运动控制中,实际的运动曲线基本上和上图差不多,我们要做的就是怎样分配各个时刻的脉冲值。
首先上半部分梯形的面积就是正向位移换算成为伺服应走的总脉冲,下半部分梯形就是回程是伺服应该走的总脉冲。梯形的高是由伺服和机械一起决定的伺服的上限速度,梯形的腰是按照我们设定的加减速时间计算出来的各个时刻的伺服脉冲。具体的分配方式起始就是个数学问题,要满足几个约束条件1)梯形的高是个常数;2)梯形的面积固定;3)梯形的腰的斜率有加减速时间计算出;3)梯形的低可以有总共需求的时间来设定。
我做过不少定位控制的项目,最多的做过65轴伺服的联动控制,如有兴趣加我的QQ:331556609.
热门招聘
相关主题
- 求助:怎样计算脉冲的移动量
 [5559]
[5559] - 2048PPR的编码器一圈发多少个...[6477]
- 关于伺服偏差计数器清零的问...[17375]
- 如何实现电子凸轮[18368]
- 求助:关于交流伺服电机的定位...[5531]
- 英国trio请进[8351]
- 提高86步进电机转速[8207]
- 谁能说说电机常数(单位:Nm/S...[16422]
- 伺服电机的Z相脉冲[8075]
- 松下伺服电机参数设置软件[6323]

官方公众号

智造工程师
-

 客服
客服

-

 小程序
小程序

-

 公众号
公众号











 工控网智造工程师好文精选
工控网智造工程师好文精选
