过节了,想一个话题,讲讲工控人最纠结的PID吧! 点击:12466 | 回复:221













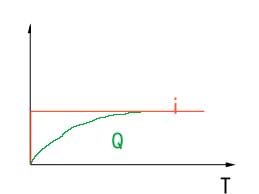

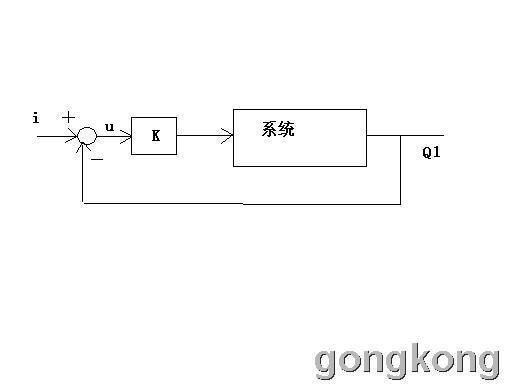 这个图不用解释了,谁想到的这个解决办法也不必追究了。。。。反正,这个是可以提高响应速度,
这个图不用解释了,谁想到的这个解决办法也不必追究了。。。。反正,这个是可以提高响应速度,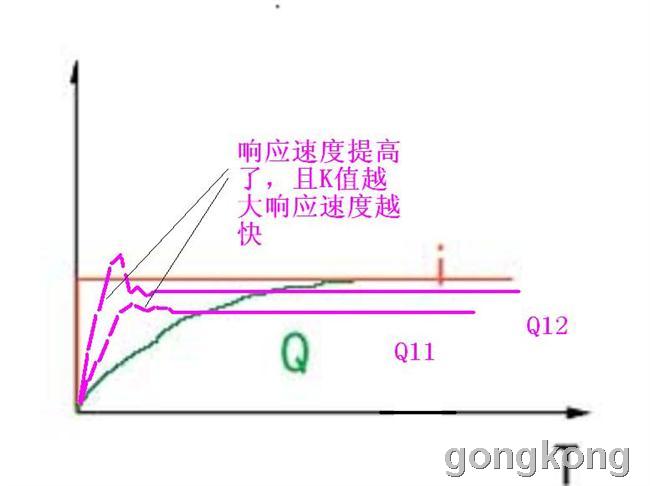


热门招聘
相关主题
- 英语资料翻译
 [2300]
[2300] - 还不知道DCS是什么,你就OUT了...[3599]
- 三菱触摸屏配方应用[1825]
- 电容补偿柜接触器老烧坏,怎么...[7724]
- SADP软件常见报错问题排查[2781]
- 求助 wincc 及vbs 脚本高手...[3291]
- 实用电线电缆自动计算表格(免...[5485]
- 交流接触器与接近开关的接线[2779]
- “位置开关+PLC+变频器”定位控...[8907]
- 如何计算无功补偿电容柜所需...[28884]

官方公众号

智造工程师
-

 客服
客服

-

 小程序
小程序

-

 公众号
公众号











 工控网智造工程师好文精选
工控网智造工程师好文精选
