过节了,想一个话题,讲讲工控人最纠结的PID吧! 点击:12487 | 回复:221









 .。。。。。。。。。。。。。。。。。。。。。。
.。。。。。。。。。。。。。。。。。。。。。。
能看懂吧???????因为 P,I,D所代表的参数的含义,各个仪表直接并不是完全相同的,容易造成混乱。。。。
比如有的变频器,让你调: 速度=xxx赫兹, 当然数值越大速度越快。
有的变频器让你调: 速度=XXX周期。(就是转一圈用多少时间)。。当然数值越小转速越快。
虽然都是在速度的牌子下,开头都是标着 速度 ,但是 此“速度”≠彼“速度”, 所以有人说了,我把速度菜单底下的那个数调大,电机转的快。。。
有的人说了,我把速度菜单的那个数调小了,电机转的快了。。。
所以说,电工们经常打架,呵呵呵。。。总是弄不清楚,到底是增大对,还是减小对!!!!
这就是电工们为什么扯不清的原因。。。。实际说透了非常简单是吧??呵呵呵。。
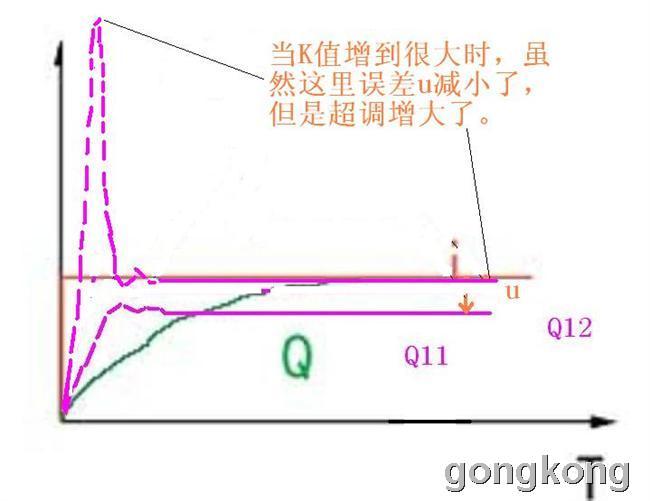 虽然U跟Kp不是比例关系,但是他们俩是“
虽然U跟Kp不是比例关系,但是他们俩是“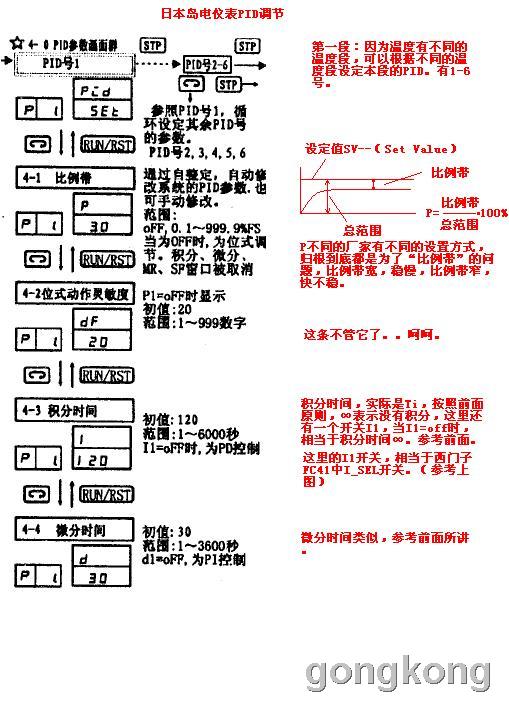 ..............................
..............................
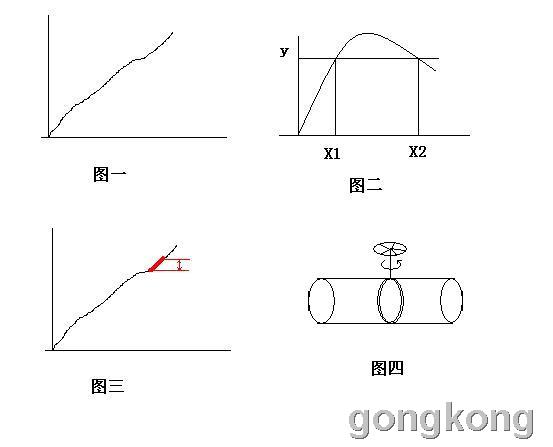
现在工业自动化行业的论文,很多都是画蛇添足的,比如我看我们老师一篇论文就是在PID基础上再加一个磁滞补偿,(补偿电动机磁场非线性畸变造成的失真),如图红线。你还可以加自己奇怪的补偿,比如绿线,比如黄线。。只要补偿效果比以前略有改善,你就可以拿来吹了,可以评职称,可以拿奖金。。。不信你去查一查,现在工控行的论文,很多都是改进某某算法,实际就是这么些小把戏,就像“宫保鸡丁”。。有的改进了“宫保鸭丁”,有的又改进了“宫保牛丁”。。有的又改进了“宫保鸡鸭丁”。。。有的又改进了,“宫保鸡柳”--鸡丁只能用调羹舀,不好用筷子夹。。。。呵呵呵。。总之,这是一个永恒的主题,你看各个学校学自动控制的毕业的,都有几个写类似论文的“用某某新算法,改善了控制云云。”呵呵呵,哪来的那么多新算法啊!!呵呵,能把老算法弄好就足够用了。。。呵呵呵。。各种改进的算法,给了学生无数的题材,给了学究们无数的扯皮的话题,给了学生们无穷无尽的论文题目。。。。呵呵呵。。中国自动化人士就在这个酱缸里翻滚扎猛,自得其乐。。。。。呵呵。。。其实那么些论文都是垃圾。。。。就算是“宫保鸡柳”确实比“宫保鸡丁”好那么一点点,又能如何呢???呵呵呵。。。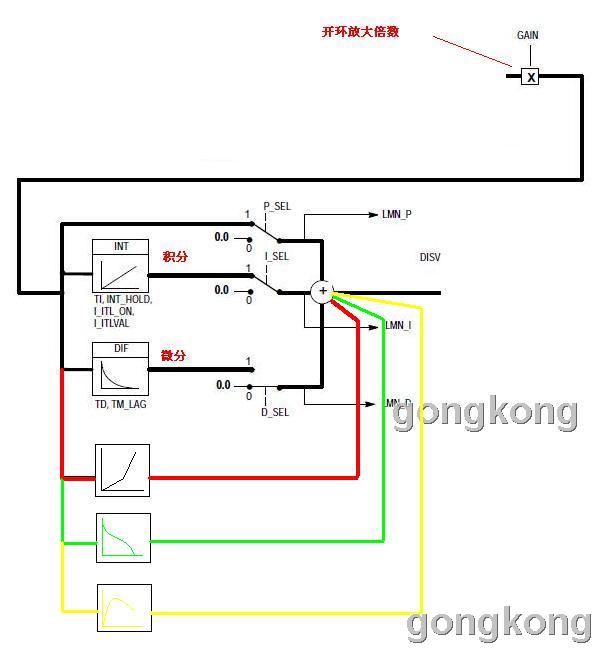
- 英语资料翻译
 [2300]
[2300] - 还不知道DCS是什么,你就OUT了...[3599]
- 三菱触摸屏配方应用[1825]
- 电容补偿柜接触器老烧坏,怎么...[7724]
- SADP软件常见报错问题排查[2781]
- 求助 wincc 及vbs 脚本高手...[3291]
- 实用电线电缆自动计算表格(免...[5485]
- 交流接触器与接近开关的接线[2779]
- “位置开关+PLC+变频器”定位控...[8907]
- 如何计算无功补偿电容柜所需...[28884]

官方公众号

智造工程师
-

 客服
客服

-

 小程序
小程序

-

 公众号
公众号











 工控网智造工程师好文精选
工控网智造工程师好文精选
