伺服培训内部资料放出 点击:10727 | 回复:61

第一章 绪论
1.1 历史的角度看电机发展
1800年伏特发明电池,是电气出现的开端,电动机的诞生和发展在这之后可以分成几个阶段。从1820年一直到整个19世纪末叶,发现了电磁现象以及相关的各种法则,诞生了交流电机的原型,并确立了电机的工业运用。从20世纪开始一直到1970年代,是电动机的成长和成熟期,有刷直流电机、感应电动机、同步电动机和步进电动机等各种电机相继诞生,半导体驱动技术和电子控制概念引入,带来变频驱动的实用化。从1970年代到20世纪末期,计算技术的飞跃发展为发展高性能驱动带来了机会,随着设计、评价、测量、控制、功率半导体、轴承、磁性材料、绝缘材料、制造加工技术的不断进步,电动机本体经历了轻量化、小型化、高效化、高力矩输出、低噪音振动、高可靠、低成本等一系列变革,相应的驱动和控制装置也更加智能化和程序化。进入21世纪,在以多媒体和互联网为特征的信息时代,电动机和驱动装置继续发挥支撑作用,向节约资源、环境友好、高效节能运行的方向发展。
永磁无刷直流电机(Brushless DC Motor)就是随着永磁材料技术、半导体技术和控制技术的发展而出现的一种新型电机。无刷直流电机诞生于20世纪50年代,并在60年代开始用于宇航事业和军事装备,80年代以后,出现了价格较低的钕铁硼永磁,研发重点逐步推广到工业、民用设备和消费电子产业。本质上,无刷直流电机是根据转子位置反馈信息采用电子换相运行的交流永磁同步电机,与有刷直流电机相比具有一系列优势,近年得到了迅速发展,在许多领域的竞争中不断取代直流电机和异步电动机。进入90年代之后,永磁电机向大功率、高功能和微型化发展,出现了单机容量超过1000KW,最高转速超过300000rpm,最低转速低于0.01rpm,最小体积只有0.8x
实际上,永磁无刷直流电机和本文重点论述的永磁交流伺服电机都属于交流永磁同步电机。按照反电动势波形和驱动电流的波形,可以将永磁同步电机分为方波驱动和正弦波驱动型,前者就是我们常说的无刷直流电机,后者又称为永磁同步交流伺服电机,主要用于伺服控制的场合。那么,伺服是什么含义呢?伺服控制的基本性能如何衡量呢?
1.2 伺服概念引入、基本性能和控制方法
伺服(Servo)来自希腊词Servus(servant),指系统跟随外部指令进行人们所期望的运动,运动要素包括位置、速度、加速度和力矩。伺服控制系统(servo control system)是所有机电一体化设备的核心,它的基本设计要求是输出量能迅速而准确地响应输入指令的变化,如机械手控制系统的目标是使机械手能够按照指定的轨迹进行运动。象这种输出量以一定准确度随时跟踪输入量(指定目标)变化的控制系统称为伺服控制系统,因此,伺服系统也称为随动系统或自动跟踪系统。它是以机械量如位移、速度、加速度、力、力矩等作为被控量的一种自动控制系统。
伺服系统的发展经历了从液压、气动到电气的过程,而电气伺服系统包括伺服电机、反馈装置和控制器。在20世纪60年代,最早是直流电机作为主要执行部件,在70年代以后,交流伺服电机的性价比不断提高,逐渐取代直流电机成为伺服系统的主导执行电机。控制器的功能是完成伺服系统的闭环控制,包括力矩、速度和位置等。我们通常说的伺服驱动器已经包括了控制器的基本功能和功率放大部分。虽然采用功率步进电机直接驱动的开环伺服系统曾经在90年代的所谓经济型数控领域获得广泛使用,但是迅速被交流伺服所取代。进入21世纪,交流伺服系统越来越成熟,市场呈现快速多元化发展,国内外众多品牌进入市场竞争。目前交流伺服技术已成为工业自动化的支撑性技术之一。
在交流伺服系统中,电动机的类型有永磁同步交流伺服电机(PMSM)和感应异步交流伺服电机(IM),其中,永磁同步电机具备十分优良的低速性能、可以实现弱磁高速控制,调速范围宽广、动态特性和效率都很高,已经成为伺服系统的主流之选。而异步伺服电机虽然结构坚固、制造简单、价格低廉,但是在特性上和效率上存在差距,只在大功率场合得到重视。本文讨论的重点将放在永磁同步交流伺服系统上。
交流伺服系统的性能指标可以从调速范围、定位精度、稳速精度、动态响应和运行稳定性等方面来衡量。低档的伺服系统调速范围在1:1000以上,一般的在1:5000~1:10000,高性能的可以达到1:100000以上;定位精度一般都要达到±1个脉冲,稳速精度,尤其是低速下的稳速精度比如给定1rpm时,一般的在±0.1rpm以内,高性能的可以达到±0.01rpm以内;动态响应方面,通常衡量的指标是系统最高响应频率,即给定最高频率的正弦速度指令,系统输出速度波形的相位滞后不超过90度或者幅值不小于50%。进口三菱伺服电机MR-J3系列的响应频率高达900Hz,而国内主流产品的频率在200~500Hz。运行稳定性方面,主要是指系统在电压波动、负载波动、电机参数变化、上位控制器输出特性变化、电磁干扰、以及其他特殊运行条件下,维持稳定运行并保证一定的性能指标的能力。这方面国产产品、包括部分台湾产品和世界先进水平相比差距较大。
在控制策略上,基于电机稳态数学模型的电压频率控制方法和开环磁通轨迹控制方法都难以达到良好的伺服特性,目前普遍应用的是基于永磁电机动态解耦数学模型的矢量控制方法,这是现代伺服系统的核心控制方法。虽然人们为了进一步提高控制特性和稳定性,提出了反馈线性化控制、滑模变结构控制、自适应控制等理论,还有不依赖数学模型的模糊控制和神经元网络控制方法,但是大多在矢量控制的基础上附加应用这些控制方法。还有,高性能伺服控制必须依赖高精度的转子位置反馈,人们一直希望取消这个环节,发展了无位置传感器技术(Sensorless Control)。至今,在商品化的产品中,采用无位置传感器技术只能达到大约1:100的调速比,可以用在一些低档的对位置和速度精度要求不高的伺服控制场合中,比如单纯追求快速起停和制动的缝纫机伺服控制,这个技术的高性能化还有很长的路要走。
1.3 伺服系统的组成与分类
由于伺服系统服务对象很多,如计算机光盘驱动控制、雷达跟踪系统、进给跟踪系统等,因而对伺服系统的要求也有所差别。工程上对伺服系统的技术要求很具体,可以归纳为以下几个方面:
① 对系统稳态性能的要求;
② 对伺服系统动态性能的要求;
③ 对系统工作环境条件的要求;
④ 对系统制造成本、运行的经济性、标准化程度、能源条件等方面的要求。
虽然伺服系统因服务对象的运动部件、检测部件以及机械结构等的不同而对伺服系统的要求也有差异,但所有伺服系统的共同点是带动控制对象按照指定规律做机械运动。从自动控制理论的角度来分析,伺服控制系统一般包括控制器、被控对象、执行环节、检测环节、比较环节等五部分。伺服系统组成原理框图如图1.1所示。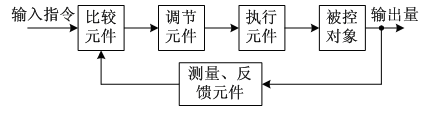
图1.1 伺服系统组成原理图
l 比较环节
比较环节是将输入的指令信号与系统的反馈信号进行比较,以获得输出与输入间的偏差信号的环节,通常由专门的电路或计算机来实现。
l 控制器
控制器通常是计算机或PID控制电路,其主要任务是对比较元件输出的偏差信号进行变换处理,以控制执行元件按要求动作。
执行环节
执行环节的作用是按控制信号的要求,将输入的各种形式的能量转换成机械能,驱动被控对象工作。
l 被控对象
被控对象是指被控制的机构或装置,是直接完成系统目的的主体。被控对象一般包括传动系统、执行装置和负载。
l 检测环节
检测环节是指能够对输出进行测量并转换成比较环节所需要的量纲的装置,一般包括传感器和转换电路。
在实际的伺服控制系统中,上述每个环节在硬件特征上并不成立,可能几个环节在一个硬件中,如测速直流电机既是执行元件又是检测元件。
伺服系统目前主要有三种控制:简单位置控制、伺服复杂控制、直接驱动控制。
l 简单控制


简单控制系统的系统构建比较简单,成本比较低,运转速度快。不足是系统无反馈,控制精度低,反应特性差。





楼主最近还看过

- 想学习学习运动控制卡的使用...
 [8833]
[8833] - 只有4根接线的光栅尺[8844]
- 松下伺服马达运行时有噪音,如...[8828]
- 关于插补周期[5438]
- 一个转盘8等分旋转,每次开机...[7496]
- 请问能否用三菱PLC的定位指令...[6828]
- 步进电机和交流伺服电机性能...[27481]
- 步进电机驱动器原理图[12802]
- 请教:伺服电机在速度控制模式...[10510]
- 伺服电机的转矩控制模式一般...[17210]

官方公众号

智造工程师
-

 客服
客服

-

 小程序
小程序

-

 公众号
公众号











 工控网智造工程师好文精选
工控网智造工程师好文精选
