【KEWEI】科威KS4系列交流伺服驱动器使用说明(十四) 点击:171 | 回复:0

发表于:2023-02-25 14:22:29
楼主
一、电磁制动器
电磁制动器(保持制动器、失电制动器)用于锁住与电机相连的垂直或倾斜工作台,防 止伺服电源失去后工作台跌落。实现这个功能,需选购带制动器的电机。制动器只能用来保 持工作台,绝不能用于减速和停止机器运动。
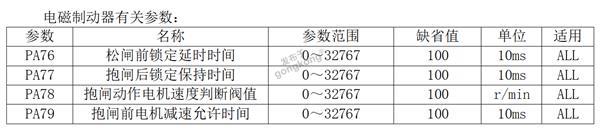
1. 电磁制动器参数
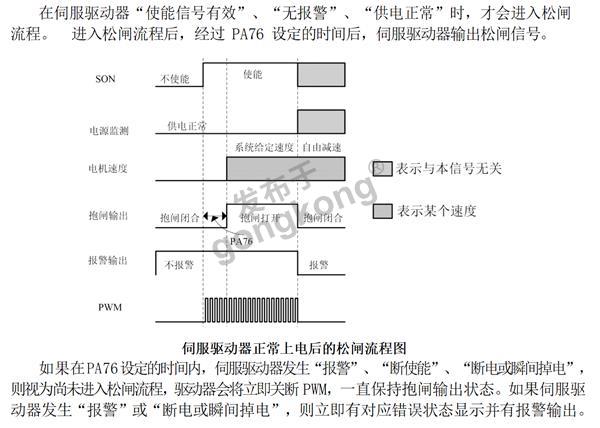
2. 电磁制动器松闸流程
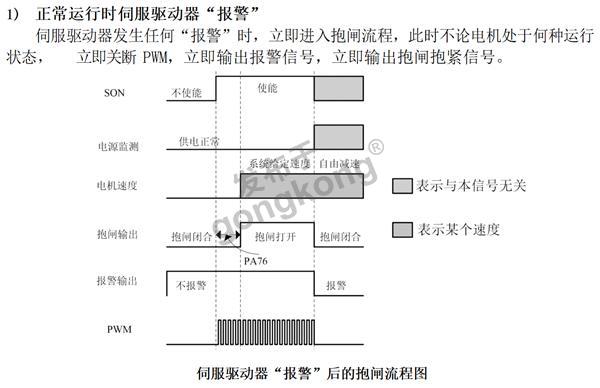
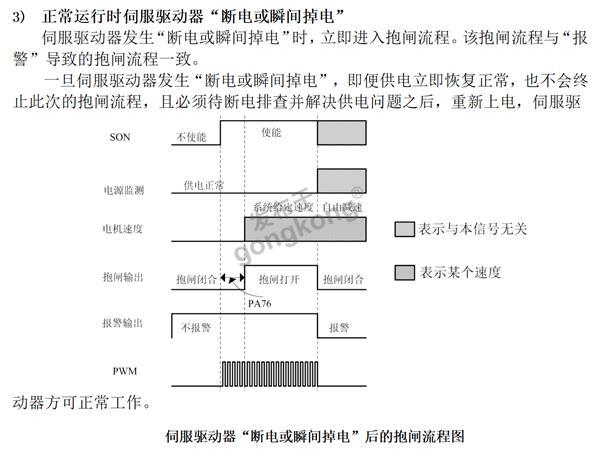
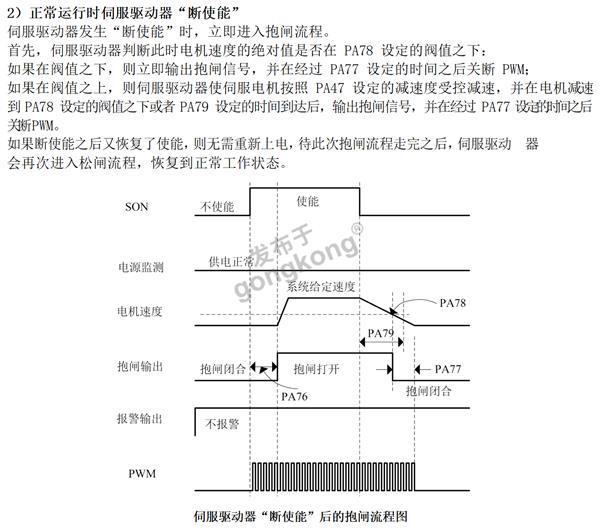
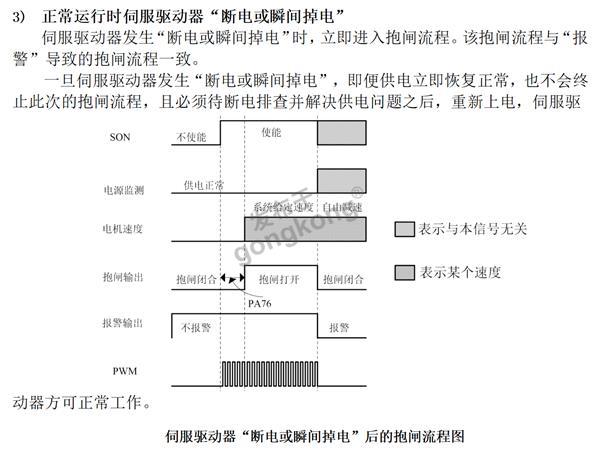
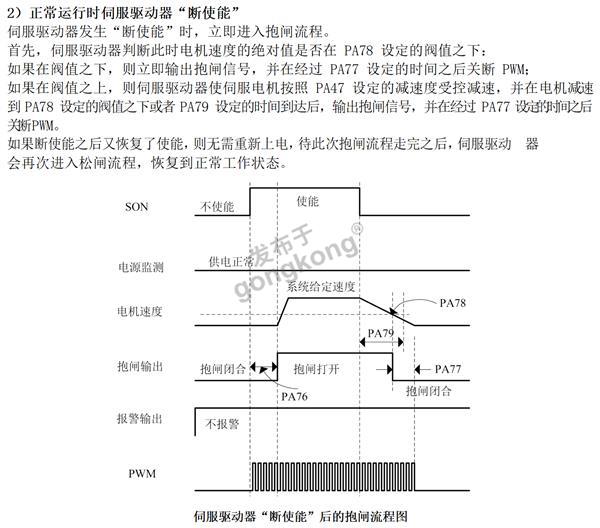
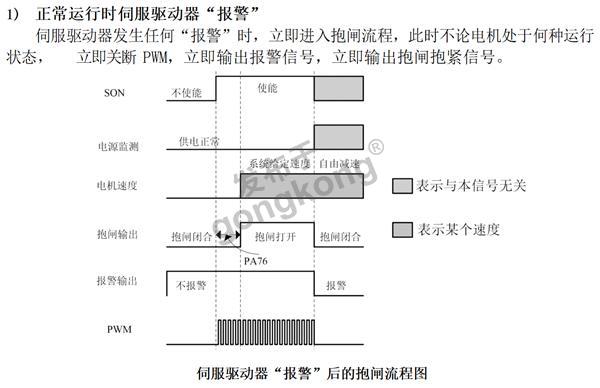
3. 电磁制动器抱闸流程
抱闸流程分为三种情况:“报警”、“断使能”、“断电或瞬间掉电”。
3. 电磁制动器抱闸流程
抱闸流程分为三种情况:“报警”、“断使能”、“断电或瞬间掉电”。
4) 在抱闸流程尚未走完的过程中,伺服驱动器发生“报警”、“断使能”、“断电或瞬间掉电”的情况
①“断使能”引起的抱闸流程中发生“报警”。
伺服驱动器立即关断 PWM,立即输出报警信号,立即输出抱闸信号。
②“断电或瞬间掉电”引起的抱闸流程中发生“报警”。
如果是 Err-1(IPM 模块故障)或 Err-2(主电路过压),则伺服驱动器立即关断 PWM, 立即输出报警信号,立即输出抱闸信号;
如果是其它报警,则伺服驱动器不响应该报警,继续按“断电或瞬间掉电”引起的抱闸流程走完。
③“断使能”引起的抱闸流程中不检测“断电或瞬间掉电”。
④“断电或瞬间掉电”引起的抱闸流程中不检测“断使能”。








楼主最近还看过
热门招聘
相关主题
- 伺服电机UVW动力线相序接错,...
 [35048]
[35048] - 步进电机梯形加速[11810]
- 求助:步进电机驱动器cw250怎...[5538]
- x轴跟随误差过大引起的程序不...[5433]
- 三菱伺服放大器MR-J2S-70B报...[10675]
- ACS运动控制卡有人用过没有[11049]
- 伺服控制器位置控制基本参数...[6550]
- 力矩电机如何控制?[9152]
- 电机用手转不动,为什么?[8945]
- electronic cam[5836]

官方公众号

智造工程师
-

 客服
客服

-

 小程序
小程序

-

 公众号
公众号











 工控网智造工程师好文精选
工控网智造工程师好文精选
