请教DMC-B140怎么接手轮 点击:3229 | 回复:38






楼主最近还看过

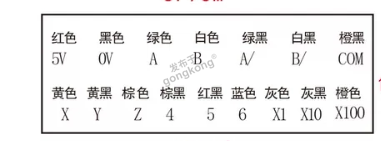
首先选择一个轴的编码器输入口作为手轮信号输入。然后把轴选以及倍率信号接入I/O信号输入端。B140本身的通用输入信号数量有限,不够把所有信号都接上的。可以将不用的轴选信号悬空,或者将多出的必要信号接到用不到的轴的原点或前后极限上。
手轮————B140
5V————5V
0V————0V(GND)
A————A+
B————B+
A/————A-
B/————B-
如果您买到的是裸卡DMC-B140,COM与0V接到一起,其他信号接到通用输入或者原点、极限输入上。如果是带扩展版的,比如DMC-B140-M之类。请和供应商确认扩展版内对通用输入或者原点、极限输入信号的处理方式,咨询具体的连接方法。

"刘岩利" 的回复,发表在3楼
对内容: 【首先选择一个轴的编码器输入口作为手轮信号输入。然后把轴选以及倍率信号接入I/O信号输入端。B140本身的通用输入信号数量有限,不够把所有信号都接上的。可以将不用的轴选信号悬空,或者将多出的必要信号接到...】进行回复:
-----------------------------------------------------------------
刘工我现在接线是手轮的X轴Y轴Z轴4轴接B140的IN1234,x1x10x100接IN567,com接i/O的36脚24VGND,手轮的A/、A、B/、B分别接X轴的PA-PA+PB-PB+,5v接X轴21脚5v,0v接X轴10脚GND,X轴的脉冲接一个驱动器,驱动器再接的电机,这样对吗
"Ծ‸Ծ" 的回复,发表在4楼
对内容: 【"刘岩利" 的回复,发表在3楼 对内容: 【首先选择一个轴的编码器输入口作为手轮信号输入。然后把轴选以及倍率信号接入I/O信号输入端。B140本身的通用输入信号数量有限,不够把所有信号都...】进行回复:
-----------------------------------------------------------------
手轮的A/、A、B/、B分别接X轴的PA-PA+PB-PB+,5v接X轴21脚5v,0v接X轴10脚GND
这个没问题
X轴的脉冲接一个驱动器,驱动器再接的电机
输入输出都用同一个轴,编程会有点麻烦
X轴Y轴Z轴4轴接B140的IN1234,x1x10x100接IN567,com接i/O的36脚24VGND,
这个不确定,建议和您的硬件供应商确认IN1234567与24VGND之间的内部接口电路
对应IN我改了12和56,但是程序里面我动手轮发现_TDA值没有变化,但是_TPA 的值随着手轮变化,导致现在手轮动,电机没有反应
首先,单独尝试一下IN12这些信号否有效接收了,在指令行输入 GADA,看看是不是有错误提示。
这个程序写的有点乱,而且有比较明显的语法错误。您把目的说明白了,我重写一遍,比看您这个方便一点。
"刘岩利" 的回复,发表在6楼
对内容: 【"Ծ‸Ծ" 的回复,发表在4楼 对内容: 【"刘岩利" 的回复,发表在3楼 对内容: 【首先选择一个轴的编码器输入口作为手轮信号输入。然后把轴选以及倍率信号接入I/O信号输...】进行回复:
-----------------------------------------------------------------
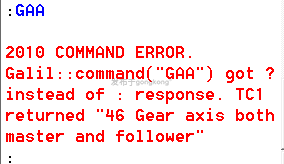
刘工我下午又重新改的程序,现在什么情况呢,以X轴为主轴,剩下的YZW从动轴手轮控制没有问题了,但是X不能动,使用GAA的时候会出错误提示,提示我X轴不能即做主轴又做从轴,我想问一下如果我要操纵X轴是不是一个手轮不行啊
"刘岩利" 的回复,发表在6楼
对内容: 【"Ծ‸Ծ" 的回复,发表在4楼 对内容: 【"刘岩利" 的回复,发表在3楼 对内容: 【首先选择一个轴的编码器输入口作为手轮信号输入。然后把轴选以及倍率信号接入I/O信号输...】进行回复:
----------------------------------------------------------------
现在有DMC-B140(北京中宝伦的),需要手轮控制4个轴,现阶段我只会把X轴设主轴,YXW轴从轴进行操纵,这三个轴控制没问题,但是X轴不能控制,请问再只用一个手轮的情况下能解决吗,谢谢
"Ծ‸Ծ" 的回复,发表在8楼
对内容: 【"刘岩利" 的回复,发表在6楼 对内容: 【"Ծ‸Ծ" 的回复,发表在4楼 对内容: 【"刘岩利" 的回复,发表在3楼 对内容: 【首先选择一个轴的编码器输入...】进行回复:
-----------------------------------------------------------------
只用一个手轮分别控制所有4个轴是可以的,但是会比较麻烦,或者接线麻烦一点,或者编程麻烦一点。
一、用一个手轮模拟两个手轮
把手轮的A、B、A\、B\信号同时连接到X、Y两轴的编码器接口,当需要控制X轴时,以Y为制轴同步,需要控制其他轴时,以X轴为主轴同步。但是要首先和您的供应商确认一下,他们有没有在编码器信号输入接口上放置终端电阻。如果放了,这个方案可能不可靠。
终端电阻是一种用于降低高频信号传输中出现问题的手段,对于手轮信号而言,它没有什么实际的优点。但是它会大大的提高接收端的电流要求。如果没有终端电阻,一个手轮的输出信号带动两个轴的编码器输入信号是没有问题的,如果有终端电阻,就不一定了。
DMC-B140本身的编码器接口上是没有终端电阻的,但是代理商有没有在自己设计的接口电路上自己放置了,您还是去确认一下才好。
二、不使用B140提供的电子齿<此处内容被屏蔽>能,而是自己另外编写跟随功能。用电子齿<此处内容被屏蔽>能本身是存在几个问题和隐患的
1、不能直接控制连接了手轮信号的轴
2、在高比例时候电机容易抖动
3、如果不是定制品,galil的同步比例最高只能设置到127.999,对于需要同步比5、50、500的应用无法实现
4、对于限位信号的处理也很麻烦,如果编程不慎,操作人员同样不慎,有造成限位失效的可能
下面10年前给用户写的一个不用电子齿<此处内容被屏蔽>能实现手轮信号控制电机的例子,您可以按照您的具体要求,自己完善它
~a是用于表示轴名称的变量,可以用ABCD或者XYZW代替
r是同步比例,这里说明一下,由于galil内部的数据保存问题,非整数部分如果不是1/65536的倍数,是会出现误差的。0.4就是一个会有误差的数,虽然误差很小,但是如果行程真的很长,还是有可能出现影响的。如果是学生,无所谓的;如果是工程师,*4/10比*0.4要精确。
#MANUAL
"运控学习" 的回复,发表在12楼
对内容: 【我还想问一下,DMC-B140这个能接液晶屏吗,从网口或者串口,用于显示各个轴的位置信息】进行回复:
-----------------------------------------------------------------
B140当然可以通过串口和/或网口和外界实现数据的交互,但是能不能连接特定的产品,还要看该产品支持的功能,比如是否支持MODBUS或MODBUS/TCP通讯协议,是否支持ASCII字符通讯。这个只能针对具体产品讨论:如何实现通讯或者是无法实现通讯,无法一概而论。
"刘岩利" 的回复,发表在19楼
对内容: 【"运控学习" 的回复,发表在18楼 对内容: 【我想问一下硬件限位可以通过读_LFn和_LRn,那软件限位有什么标志位吗 ...】进行回复: --------------...】进行回复:
-----------------------------------------------------------------
刘工你好,关于软限位这个我读_SCn的值解决了,但是当我设置了软限位或者接上硬件限位后,手轮操控如果碰到限位,有时候会导致程序卡死,所有轴都动不了,右栏会出一条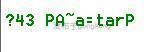 的提示,这是为什么呢,因为上一条PA没执行完卡在这了吗
的提示,这是为什么呢,因为上一条PA没执行完卡在这了吗
"刘岩利" 的回复,发表在21楼
对内容: 【因为触发硬限位信号后,会退出位置跟随模式,导致PA指令出错,而指令出错又会中止程序执行,对于所有手轮的操作都没有反应。对于软极限,处理起来很简单,在程序中执行PA指令前检查tarP是否超出极限范围,如...】进行回复:
-----------------------------------------------------------------
感谢刘工,软限位的我解决了,对与硬限位的对比当前值和tarP的大小,当前值是指_RPn吗?忽略触发限位方向运动是怎么实现的给个相反的值吗
- ACS运动控制卡有人用过没有
 [11049]
[11049] - 选择运动控制卡的一些建议!!...[5636]
- 伺服电机扭矩模式,和速度有关...[6134]
- 求助伺服电机抗干扰[12633]
- 交流伺服电机能不能当普通电...[5699]
- 交流伺服电机可以用直流供电...[9869]
- 运动控制卡连接伺服电机的一...[15350]
- 求助:松下伺服电机的最大加速...[18370]
- 不懂:转动惯量和转矩[10434]
- 急求助:怎样克服步进电机启动...[10983]

官方公众号

智造工程师
-

 客服
客服

-

 小程序
小程序

-

 公众号
公众号











 工控网智造工程师好文精选
工控网智造工程师好文精选
