EtherCAT运动控制器中脉冲接口的快速调试与诊断 点击:1555 | 回复:4

脉冲型驱动器试运行可借助ZDevelop软件快速验证,主要包含以下四个部分:硬件接线,ZDevelop连接控制器,配置轴参数,发送运动命令查看电机是否转动。若无法运行参见问题排查部分解决。
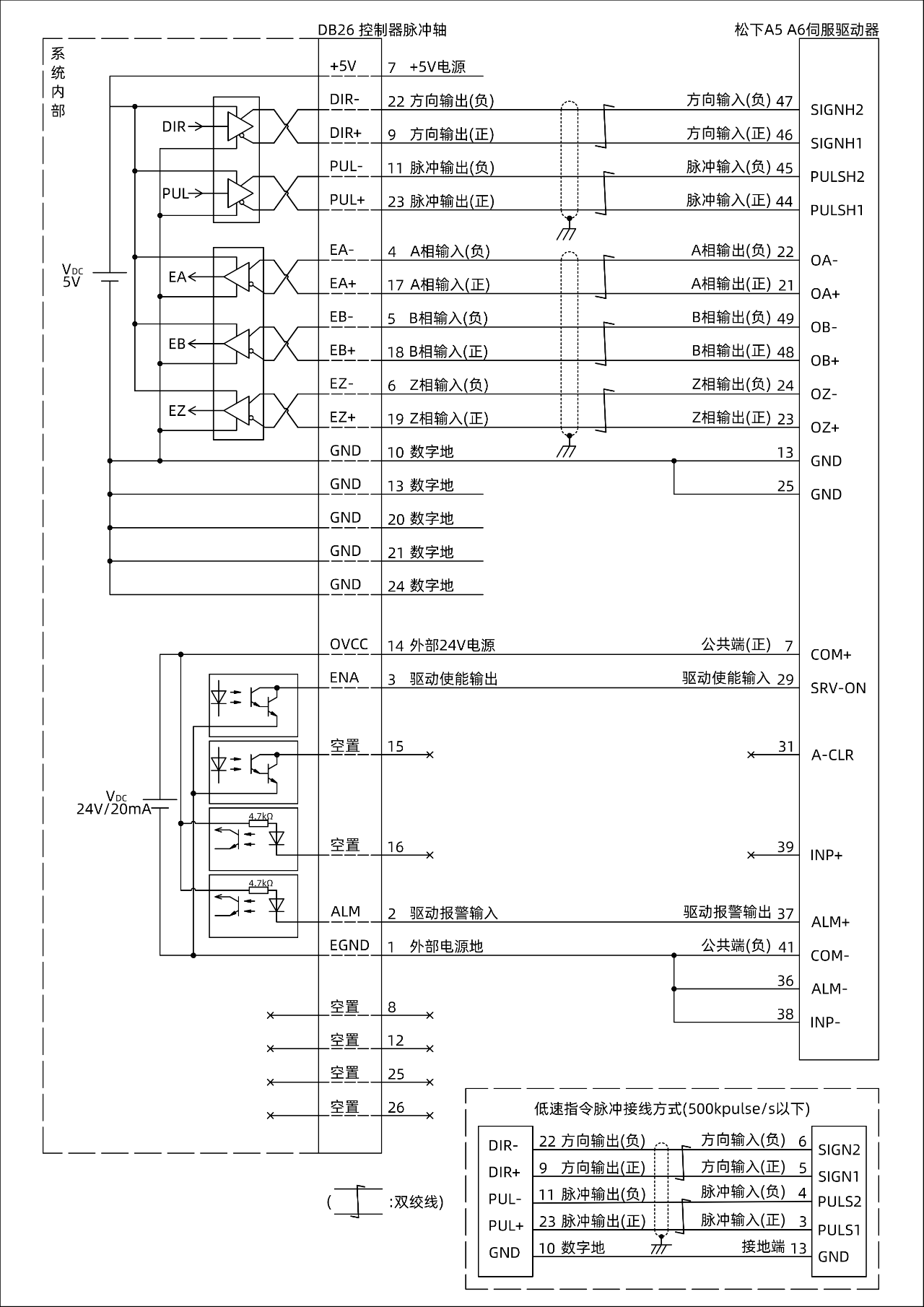
一、硬件接线
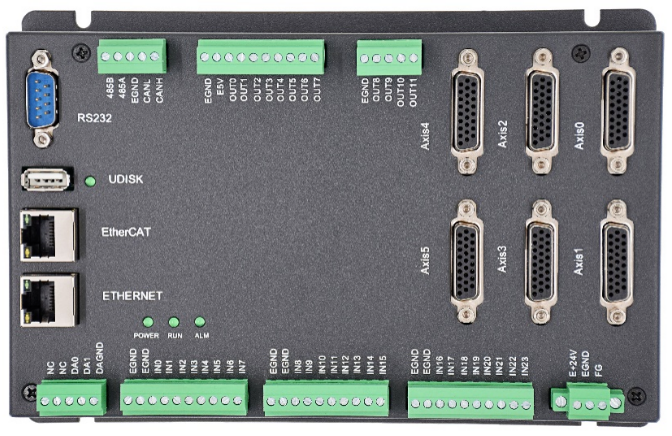
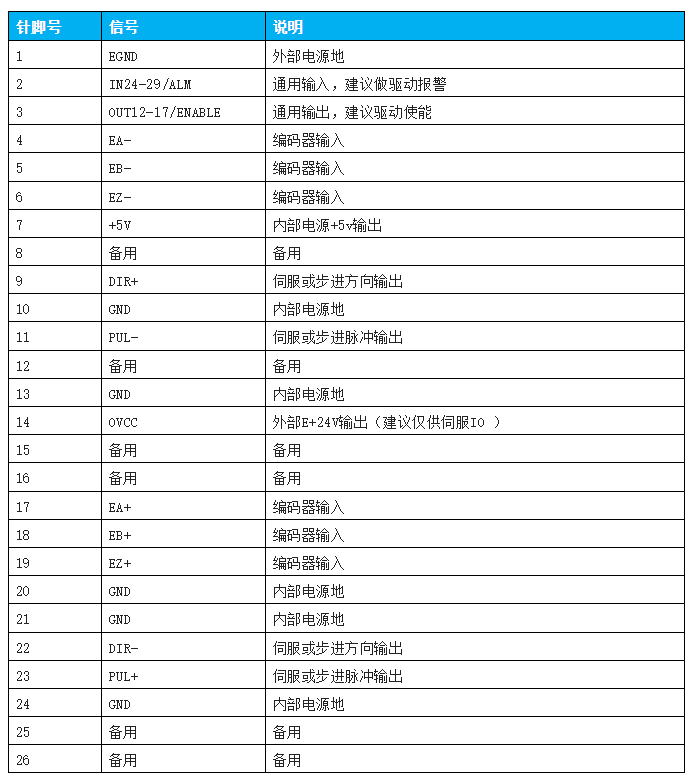
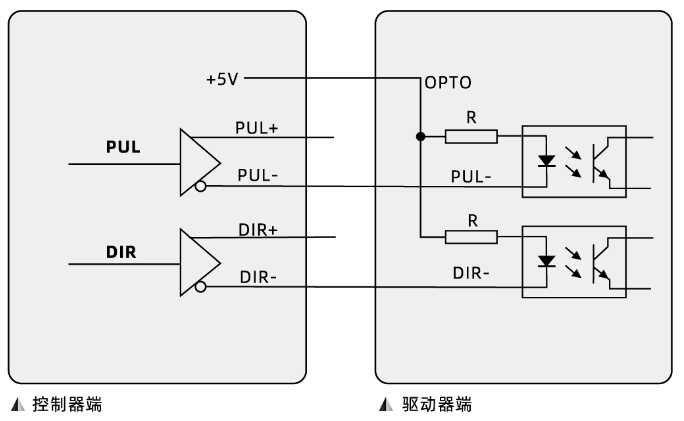
正运动技术大部分控制器的脉冲控制接口为面板上提供的DB26母头的端子,例如下图ZMC432的AXIS端子,板载6个脉冲轴的接口。 AIXS端子内主要包含脉冲输出的接线端子,编码器反馈的接线端子,驱动器的使能和报警信号,5V电源输出和公共端,如下表所示。 AXIS 0 轴接口端子内的使能信号为OUT12; AXIS 1 轴接口端子内的使能信号为OUT13; 依此类推。 使能操作:OP(12,ON),OP(13,ON)等。 驱动器报警信号通过针脚2传入控制器, 参考上图。 AXIS 0 轴接口端子内的报警信号为IN24; AXIS 1 轴接口端子内的报警信号为IN25; 依此类推。 驱动器报警输入信号需要使用ALM_IN指令配置:ALM_IN(0)=24,ALM_IN(1)=25等。 编码器的单端接线图如下,编码器的A,B(无Z信号的型号只接AB两相)与控制器正端子EA+、EB+一一对应连接,控制器的负端子悬空,编码器的0V或地线端子,连接控制器轴接口内的GND端子即可,再按编码器的供电要求接入电源。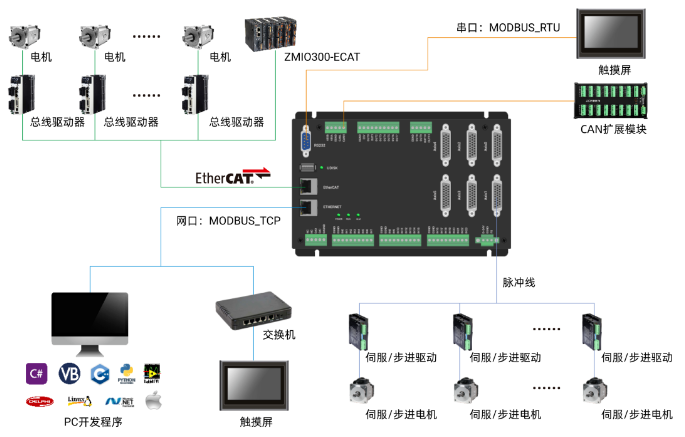
EtherCAT运动控制器中脉冲接口如何实现快速调试与诊断,请点击下方链接获取完整教学示例代码。
点击→《EtherCAT运动控制器中脉冲接口的快速调试与诊断》即可获取相关教程和示例代码。





楼主最近还看过


- 谁知道HIPERFACE的SINCOS编码...
 [6192]
[6192] - 直流电机+编码器的方式可以用...[6993]
- 请教:步进电机的智能半流工作...[5384]
- 伺服控制器的速度控制精度一...[10104]
- KW跟N.M之间怎么换算[10331]
- 伺服驱动器的问与答[48851]
- 关于步进电机问题( 刘岩利及...[9239]
- S曲线加速5段式怎样解算,求解...[5838]
- 伺服电机直接驱动丝杆发出啸...[7235]
- 请教;步进电机驱动器的作用[6747]

官方公众号

智造工程师
-

 客服
客服

-

 小程序
小程序

-

 公众号
公众号











 工控网智造工程师好文精选
工控网智造工程师好文精选
