运动控制器C++开发(二):多轴PSO等距/周期输出 点击:1377 | 回复:2

发表于:2023-03-17 11:45:47
楼主
ZMC408CE是正运动推出的一款多轴高性能EtherCAT总线运动控制器,具有EtherCAT、EtherNET、RS232、CAN和U盘等通讯接口,ZMC系列运动控制器可应用于各种需要脱机或联机运行的场合。
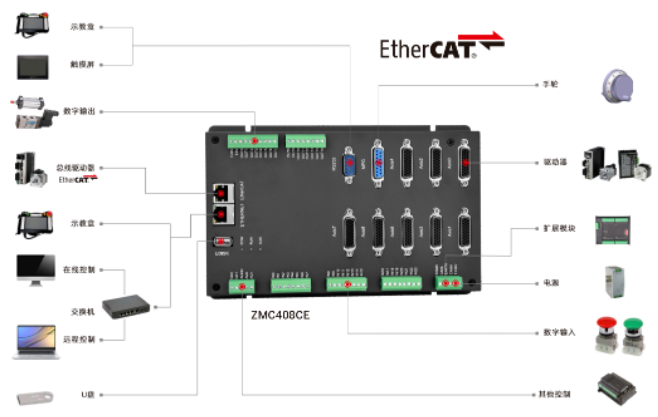

ZMC408CE内置高精度PSO位置同步输出功能,在加工圆角与曲线时即使进行有减速调整,在高速加工的场合中也能控制激光输出的等间距输出。
ZMC408CE如何实现多轴PSO等距/周期输出,请点击下方链接获取完整教学示例代码。
点击→《运动控制器PSO视觉飞拍与精准输出的C++开发(二):多轴PSO等距/周期输出》即可获取相关教程和示例代码。





楼主最近还看过

发表于:2023-03-17 11:46:21
2楼
热门招聘
相关主题
- 想学习学习运动控制卡的使用...
 [8833]
[8833] - 求助:伺服电机能在通电时处于...[7384]
- 谁知道音圈电机???[13263]
- 选择运动控制卡的一些建议!!...[5636]
- 伺服电机试运行时震动很厉害...[5641]
- 关于光栅尺精度[5815]
- 编码器一般接在驱动器上还是...[7295]
- 求助:怎样计算脉冲的移动量[5559]
- 直线电机 哪个牌子的性能比较...[14941]
- 关于速度环增益的问题[9790]

官方公众号

智造工程师
-

 客服
客服

-

 小程序
小程序

-

 公众号
公众号











 工控网智造工程师好文精选
工控网智造工程师好文精选
