EtherCAT时钟同步概念描述 点击:963 | 回复:2

发表于:2021-09-11 15:57:14
楼主
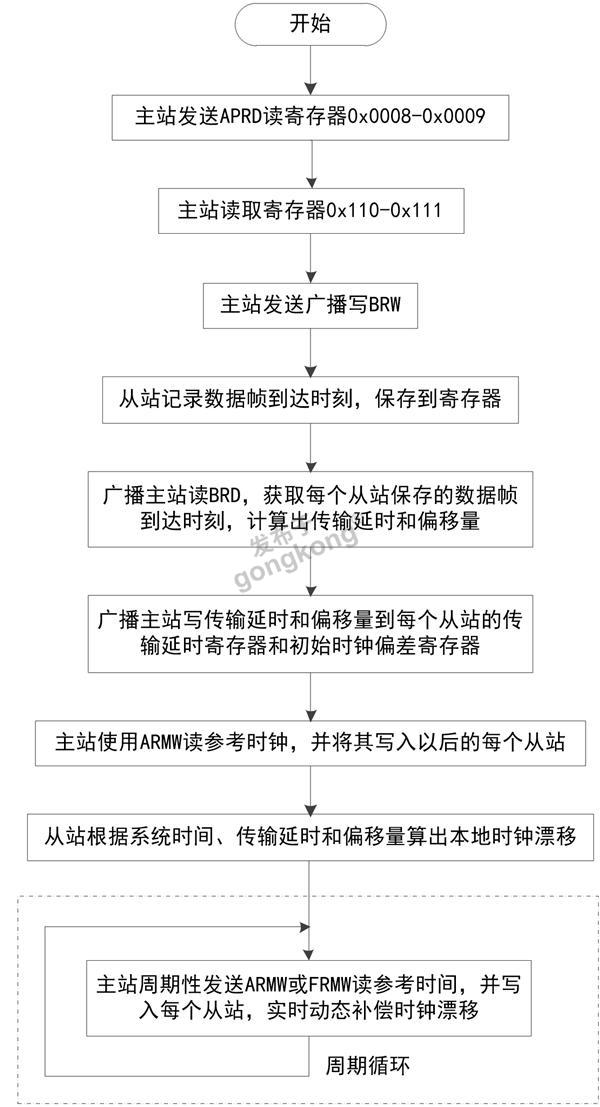
在运动控制系统的多轴运动网络中,往往需要让多个从站同时开始或停止运动,EtherCAT 具有很好的同 步性能,利用“分布时钟(DC)”机制可实现各从站节点之间小于 1 微秒的时钟同步精度,这在要求分布系 统同时工作的场合显示十分重要。
系统启动时,各从站的本地时钟和参考时钟之间有一定的差异,称为时钟偏移量,主站连接的第一个具有 分布时钟功能的从站作为参考时钟,以参考时钟来同步其他设备和主站时钟。
由于各从站使用的晶振等原因,从站的计时周期会有微小偏差,称为时钟漂移,数据帧在各个从站之间传播时的延时称为传输延时,包括物理 层和链路层的延时,这些因素都将进行补偿,使的补偿后的本地系统时间和网络系统时间达到时钟同步,从而 使得整个 EtherCAT 网络系统同步。
术语解释 :
APRD:读数据,按照从站在网段内的的位置来选取从站的存储空间。
BRW:广播写,写入所有联网从站的物理存储区域。
BRD:广播读,读取所有联网从站的物理存储区域。
ARMW:一读多写,主站按从站的物理连接顺序读取下一个从站的寄存器值,并将读取的数据写入到 其他从站的同一寄存器。
FRWM:设置一读多写。





楼主最近还看过

热门招聘
相关主题
- 请教,把双脉冲信号改为单脉冲...
 [5462]
[5462] - 国产的伺服电机什么牌子较好[7575]
- 双伺服同步控制[6208]
- 两台电机如何实现同步[11058]
- 伺服编码器输出为差动驱动如...[19596]
- 请教:步进电机的智能半流工作...[5384]
- 位置环增益==位置环PID??[5529]
- 伺服电机正反转速不一样?[6429]
- 求助:步进电机开机抖动[7160]
- 求教。用PLC控制两轴画圆[6312]

官方公众号

智造工程师
-

 客服
客服

-

 小程序
小程序

-

 公众号
公众号











 工控网智造工程师好文精选
工控网智造工程师好文精选
