六西格玛在深圳工业机器人领域的应用 点击:323 | 回复:0

六西格玛在深圳工业机器人领域的应用,本文就六西格玛在工业机器人领域的应用做以下分析:
一、优化阶段应用研究

1、试验设计及优化分析
根据设计阶段的设计计分卡可知,对于工业机器人演示系统,抓取精度不是很理想,因此需要对此开展优化设计.机械臂的抓取精度与机械臂各关节的转动角速度相关,不同机械臂关节的转动角速度组合对结果影响较大,需要对机械臂各关节的转动角速度进行优化设计,以满足机械臂抓取精度要求.以所选工业机器人演示系统中的机械臂关节角速度为设计变量,以机械臂抓取精度为响应变量,采用田口试验设计方法,每个因子选择三个水平,共需要进行9次分析.经分析,机械臂抓取精度主要由关节1、关节2与关节5的转动角速度决定,根据试验结果拟合出转换函数:
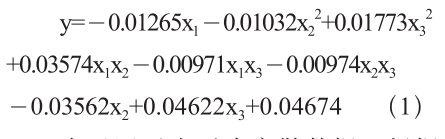
2、蒙特卡罗模拟
优化组合的三个因子在取值范围内满足正态分布,因子1的标准差为0.9,因子2与3的标准差为0.5,经统计分析,抓取精度的C pk 为1.54,还未达到六西格玛水平要求.因此,以现有参数为基础,依据数值拟合表达式进行参数灵敏度分析(求算偏导数),进而修正设计参数.由偏导数可以看出:关节2、关节5的转动角速度对抓取精度的影响要小于关节1的转动角速度.因此,需要重点改善关节1的公差设计.通过改善因子1的标准差,使其达到0.5,因子2与3的标准差仍为0.5,抓取精度的响应情况,如图3所示,抓取精度的C pk 为2.59,达到了六西格玛的水平,试验结果较理想,也验证了关节1的转动角速度对抓取精度的影响较大.
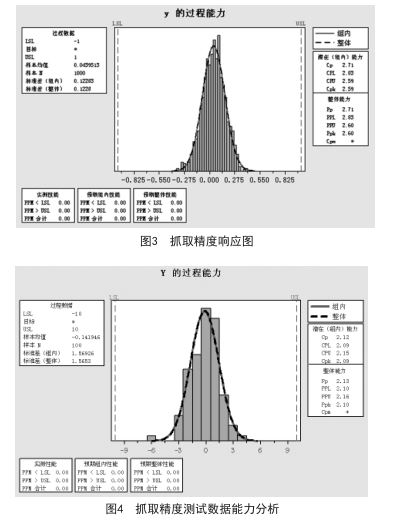
二、验证阶段应用研究
验证阶段工作包括制定样机计划、验证计划、标准操作程序、质量控制计划、项目移交方案以及下一步项目计划.关键验证试验包括机械臂抓取精度测试、双目跟踪验证测试、目标抓取验证试验进行了结果统计分析,均达到过程控制性能要求(见图4).通过六西格玛设计,我们实现了创新产品的低成本设计和可靠的设计质量,性能满足了客户需求,取得直接收益约600万元人民币;同时未来经济效益预期超千万元.





楼主最近还看过
- 上海图书馆导入六西格玛可行...
 [1282]
[1282] - 六西格玛项目模型DMAIC[520]
- 求助,PLC485通讯口测试[583]
- 六西格玛设计DOE试验设计培训...[1136]
- X农化厂推行六西格玛管理项目...[528]
- 精益生产培训在汽车纵梁生产...[710]
- 六西格玛管理培训不能因“不擅...[508]
- 东莞某农化厂精益生产案例分...[451]
- 六西格玛黑带报考条件有哪些...[940]
- 印刷公司推行单件流培训的效...[1516]

官方公众号

智造工程师
-

 客服
客服

-

 小程序
小程序

-

 公众号
公众号











 工控网智造工程师好文精选
工控网智造工程师好文精选
