PLC在伺服运动控制中扮演什么角色? 点击:5235 | 回复:155

发表于:2012-08-21 11:13:00
楼主
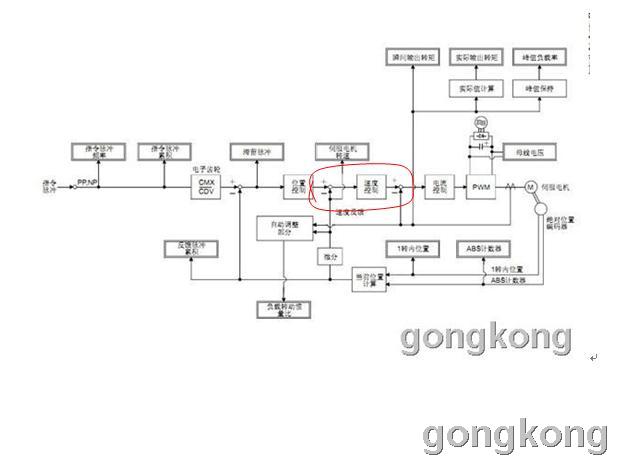
1、伺服的结构原理可以简单概述为:
PLC+变频器+编码器+交流电机
2、编码器检测反馈电机角位移、转速:
1)角位移以“360°÷脉冲/周数”为单位;
2)角速度以“脉冲数/秒×(360°÷脉冲/周)”为单位;
3、变频器即驱动器,接受PLC的执行指令,把工频交流电变成适合电机伺服要求的交流电源:
1)根据电机转速的需要输出交流电的频率f;
2)根据电机转速、转矩的需要输出交流电的电压;
4、PLC,输入操作指令,输出执行指令:
1)PLC的计数器输出执行指令,包括启动、停车、加速、减速、制动,它是伺服控制位置环的核心;
2)PLC的计数器一般为减法计数器,位移指令脉冲数就是这个计数器的设定数;
3)PLC的计数器输入的减脉冲计数,就是编码器检测的反馈角位移脉冲数;
4)举例说,位移指令脉冲1000,编码器检测反馈角位移脉冲由0-1000时,计数器输出由1000-0:
A、计数器输出=1000,为启动、加速;
B、900<计数器输出<100,恒速;
C、计数器输出≤100,为减速;
D、计数器输出=0,为停车;
5、PLC的计数器,构成伺服的位置环;
6、伺服驱动器即变频器,是速度环、电流环(力矩环)及相关参数的核心,速度环、电流环以频率调节器为调解器,速度环的反馈信号取之编码器;








热门招聘
相关主题
- Karlen and Pakwan
 [1964]
[1964] - 电气工程师手册下载[9213]
- 光耦PC817应用时电解电容起什...[6746]
- wincc7.4软件许可证[2462]
- 断路器电流参数作用的及意义[4991]
- 单相电机的倒顺开关正反转接...[558680]
- 你知道伺服的位置环是怎么构...[2386]
- 编码器的作用?减速机和变频器...[5795]
- 关于电机“星 / 三角启动”过...[5712]
- 电气常用工具英语[1914]

官方公众号

智造工程师
-

 客服
客服

-

 小程序
小程序

-

 公众号
公众号











 工控网智造工程师好文精选
工控网智造工程师好文精选
