运动控制器C++开发(三):二维/三维/多轴PSO输出 点击:1503 | 回复:2

发表于:2023-04-04 17:28:36
楼主
ZMC408CE 是正运动推出的一款多轴高性能EtherCAT总线运动控制器,具有EtherCAT、EtherNET、RS232、CAN和U盘等通讯接口, ZMC系列运动控制器可应用于各种需要脱机或联机运行的场合。 ZMC408CE内置高精度PSO位置同步输出功能,在加工圆角与曲线时即使进行有减速调整,在高速加工的场合中也能控制激光输出的等间距输出。 ZMC408CE如何实现二维/三维/多轴PSO输出,请点击下方链接获取完整教学示例代码。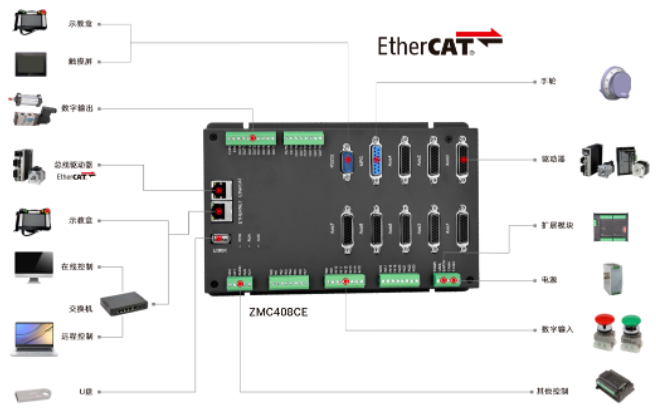

点击→《运动控制器PSO视觉飞拍与精准输出的C++开发(三):二维/三维/多轴PSO输出》即可获取相关教程和示例代码。





楼主最近还看过

发表于:2023-04-04 17:31:53
2楼
热门招聘
相关主题
- 直流电机的UVW相
 [9831]
[9831] - 有谁能告诉一下力矩电机的工...[18268]
- 求助:关于步进电机最大启动频...[5533]
- 松下A6伺服故障代码及处理方...[11687]
- 求助:伺服电机失控飞车[6901]
- 哪些牌子的伺服电机质量好?[11326]
- 绝对值编码器的信号输出及与...[9120]
- 伺服控制技术自学手册[23588]
- 求助!送布机和收布机的伺服相...[7008]
- 请教 伺服中的扭矩指令滤波器...[6429]

官方公众号

智造工程师
-

 客服
客服

-

 小程序
小程序

-

 公众号
公众号











 工控网智造工程师好文精选
工控网智造工程师好文精选
