使用正运动技术EtherCAT总线控制器怎么设置与驱动器通讯 点击:1017 | 回复:1

发表于:2022-02-16 11:22:58
楼主
伺服驱动器或与 EtherCAT 扩展模块控制器接线遵循的规则相同,使用一根网线将控制器的 EtherCAT 总线端口与其他设备的 EtherCAT 口相连。
注意伺服驱动器的 EtherCAT 接口有两个,有些驱动器这两个口可以随意接,有些分为 EtherCAT IN 和 EtherCAT OUT,IN 口接上一级设备,OUT 口接下一级设备,二者不能混用,要注意连接顺序。
多轴控制时伺服驱动器的 EtherCAT OUT 口再连接下一级驱动设备的 EtherCAT IN 口,依此类推。
EtherCAT 总线的接线配置如下图:
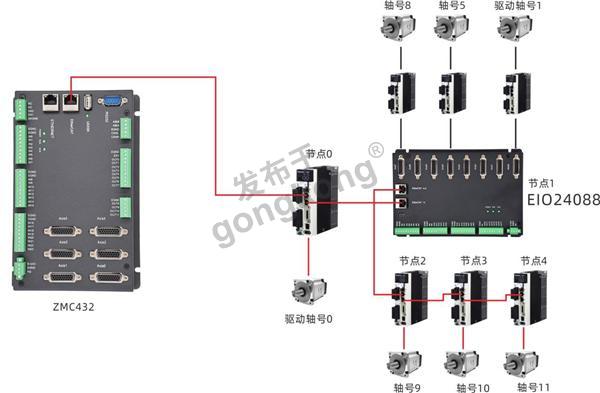
EtherCAT 总线槽位号默认为 0。
设备号(node),又叫节点,是指一个槽位上连接的所有设备的编号,从 0 开始,按设备在总线上的连接顺序自动编号。
控制器会自动识别出槽位上的驱动器,编号从 0 开始,按驱动器在总线上的连接顺序自动编号。驱动 器编号与设备号不同,只给槽位上的驱动器设备编号,其他设备忽略。
EtherCAT 总线和 RTEX 总线的编号规则相同。
EtherCAT 总线上连接的电机需要编写一段 EtherCAT 总线初始化程序来进行使能。使能之后若 ATYPE=65 位置模式,用法与脉冲电机一致,运动指令都是相同的;若 ATYPE=66 速度模式或 ATYPE=67 力矩模式或,此时不能使用运动指令,只能使用 DAC 指令控制轴持续运动,停止将 DAC=0。





楼主最近还看过

发表于:2022-02-16 11:27:46
1楼
热门招聘
相关主题
- 求助:如何只改驱动器等外围接...
 [5926]
[5926] - 关于步进电机问题( 刘岩利及...[9239]
- 一个转盘8等分旋转,每次开机...[7496]
- 一个变频器接两个电机??[5706]
- 伺服电机控制电压到底是什么...[5871]
- 伺服驱动器倍频技术与电子齿...[5365]
- PLC脉冲驱动两台伺服的奇怪问...[8128]
- 请教步进电机发热特严重的问...[6387]
- 求助:伺服电机能在通电时处于...[7384]
- 请问能否用三菱PLC的定位指令...[6828]

官方公众号

智造工程师
-

 客服
客服

-

 小程序
小程序

-

 公众号
公众号











 工控网智造工程师好文精选
工控网智造工程师好文精选
