运动控制功能实现SCARA机械手正逆解模式的Basic相关指令 点击:951 | 回复:2

发表于:2022-01-12 14:59:26
楼主
正解模式
BASE(Viraxis_x, Viraxis_y, [Viraxis_v] [,Viraxis_z])
CONNREFRAME(1,tablenum,Axis_a,Axis_b[,Axis_c][,Axis_d])
WAIT LOADED
建立成功后,虚拟轴 MTYPE 将显示为 34,IDLE 显示为 0。此时只能操作关节轴在关节坐标系中运动,虚拟轴会自动计算末端工作点位于直角坐标系中的位置。
逆解模式
BASE(Axis_a,Axis_b[,Axis_c][,Axis_d])
CONNFRAME(1,tablenum, Viraxis_x, Viraxis_y, [Viraxis_v] [,Viraxis_z])
WAIT LOADED
建立成功后,关节轴 MTYPE 将显示为 33,IDLE 显示为 0。此时只能操作虚拟轴在直角坐标系中运动,关节轴会自动计算在关节坐标系中如何联合运动。
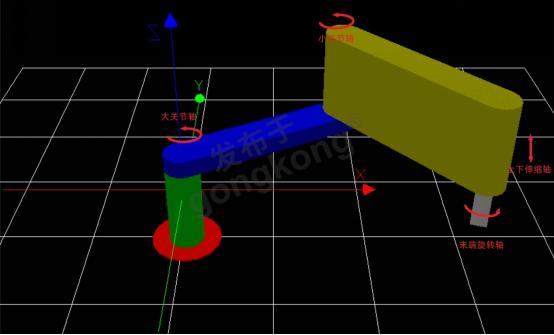
机械手控制示意图





楼主最近还看过

热门招聘
相关主题
- 关于速度环增益的问题
 [9790]
[9790] - 伺服电机的低速性能和转速-扭...[13334]
- 求助:步进电机如果堵转了,有...[6485]
- 脉冲的占空比对步进电机的影...[9057]
- PID位置环,速度环,电流环控制...[17570]
- 伺服电机高速运行时速度慢慢...[12054]
- 伺服增益参数调整技巧,便于现...[5730]
- 关于光栅尺精度[5815]
- 伺服电机的抱闸在掉电时延迟...[8590]
- 伺服电机控制系统,在回电气原...[14997]

官方公众号

智造工程师
-

 客服
客服

-

 小程序
小程序

-

 公众号
公众号











 工控网智造工程师好文精选
工控网智造工程师好文精选
