机器视觉+运动控制技术:应用开发教程之LabVIEW 点击:1097 | 回复:2

今天,我们来讲解一下正运动技术运动控制卡应用开发教程之LabVIEW。
在正式学习之前,我们先了解一下正运动技术的运动控制卡ECI2418和ECI2618。这两款产品分别是4轴,6轴运动控制卡。

ECI2418支持4轴脉冲输入与编码器反馈,板载24点输入,16点输出,2AD,2DA,支持手轮接口,其中特定输出支持高速PWM控制。

ECI2618支持6轴脉冲输入与编码器反馈,板载24点输入,16点输出,2AD,2DA,支持手轮接口,其中特定输出支持高速PWM控制。
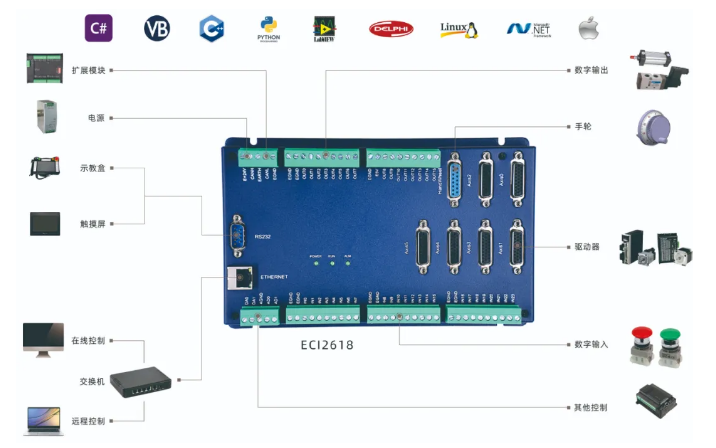
ECI2418,ECI2618均使用同一套API函数,均支持C、C++、C#、LabVIEW、Python、Delphi等开发语言,支持VC6.0、VB6.0、Qt、.Net等平台,支持Windows、Linux、WinCE、iMac等操作系统。
一、LabVIEW导入共享库流程
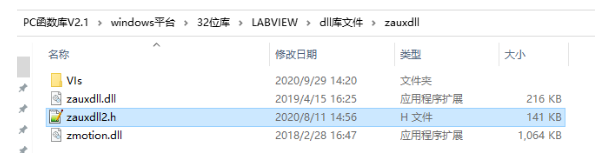
1、从光盘资料中下载LabVIEW的函数库。
正运动提供的LabVIEW专用的DLL函数库如下图,可以按照下面的步骤可以自动生成对应Vi函数库,如有需要封装自己的函数库可以在zauxdll源码中编译自己的函数封装,生成对应的Vi。
不同LabVIEW版本对应的不同的Vi函数库,高版本的LabVIEW也可以直接使用低版本的Vi,如果使用的LabVIEW版本过低,可以通过高版本的LabVIEW将Vi库转成低版本的,也可联系厂家提供。
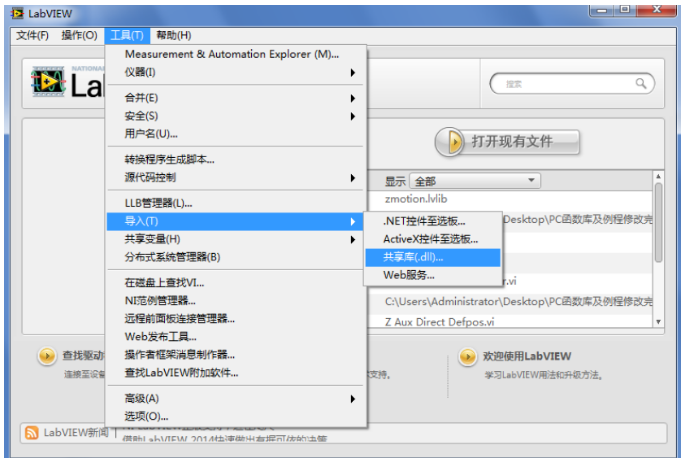
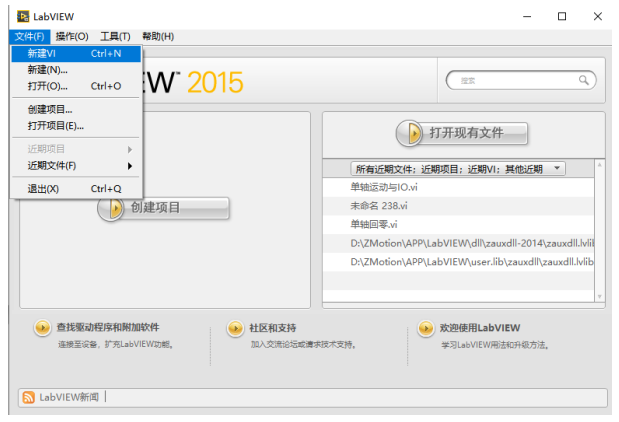
2、打开 LabVIEW界面。在【工具】选项中,选择导入—共享库“.dll”。
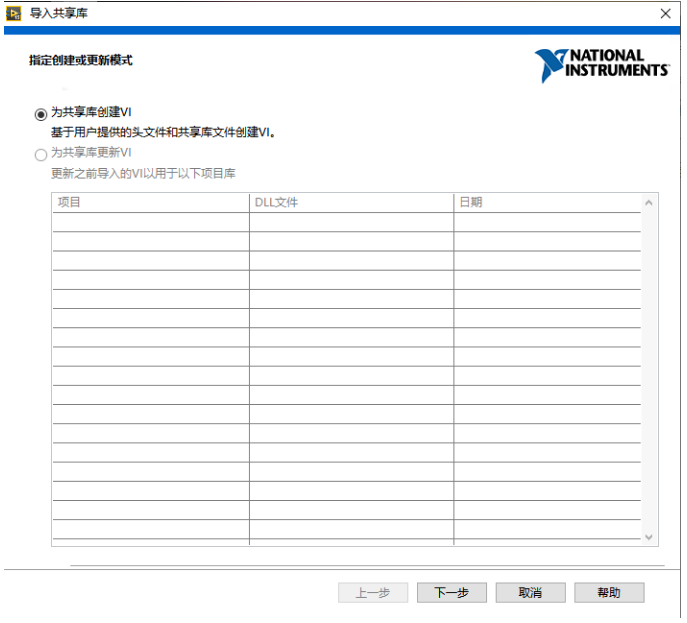
3、在出现的界面中,选择“为共享库创建Vi”,然后点击下一步。
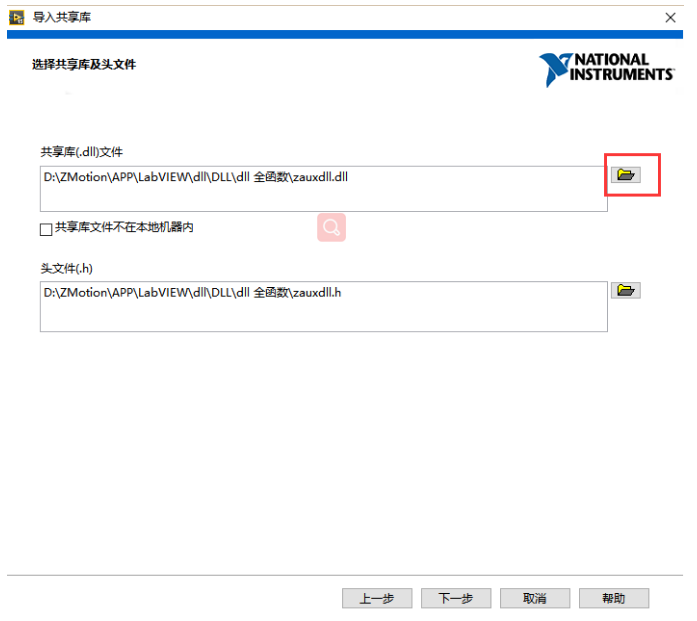
4、选择共享库及头文件,把zauxdll.dll和 zauxdll.h文件载入。
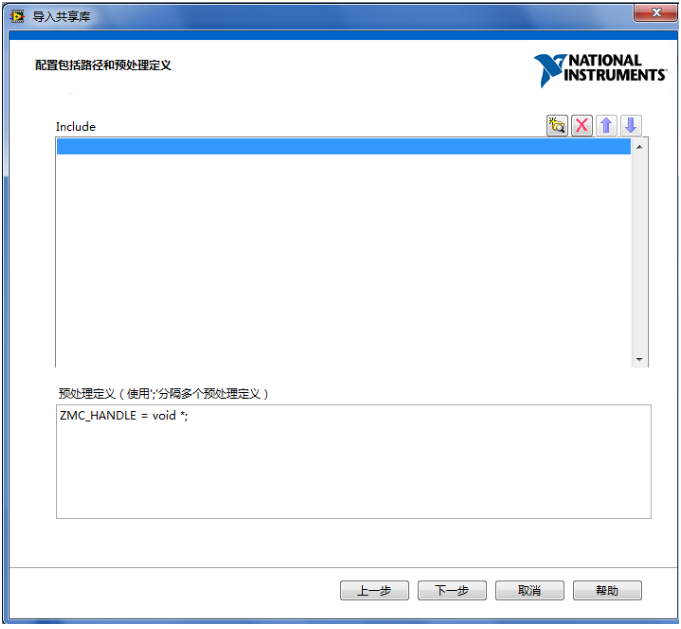
5、配置包括路径和宏定义命令,此时加入“ZMC_HANDLE=void*;”预处理命令。
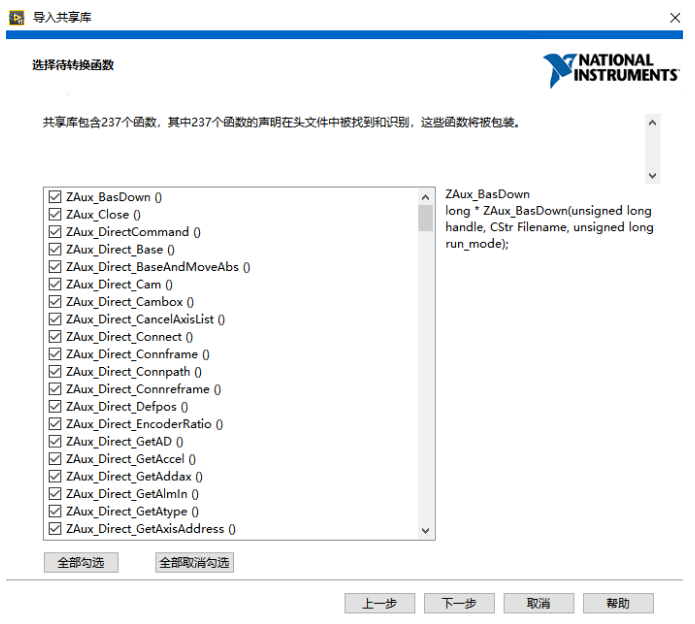
6、全部勾选 .dll 库里面的函数定义文件,下一步,基本库中有些函数是不常用的,故有些函数是没有的可以不用管。
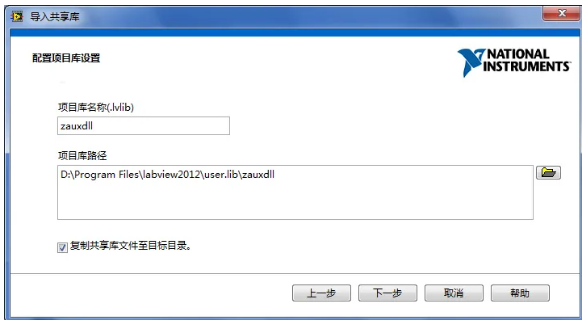
7、配置好生成的 Vi 库的路径和名称。
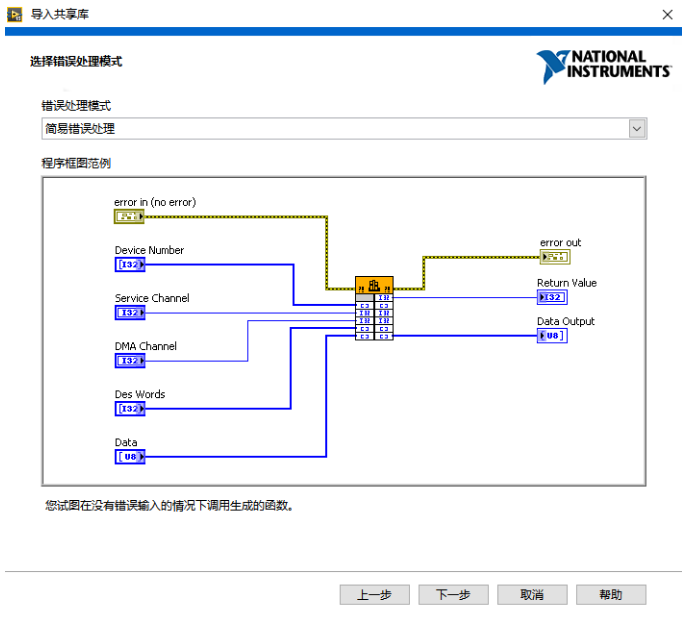
8、选择错误处理方式,这里有多种方式,可以选择简易错误处理。
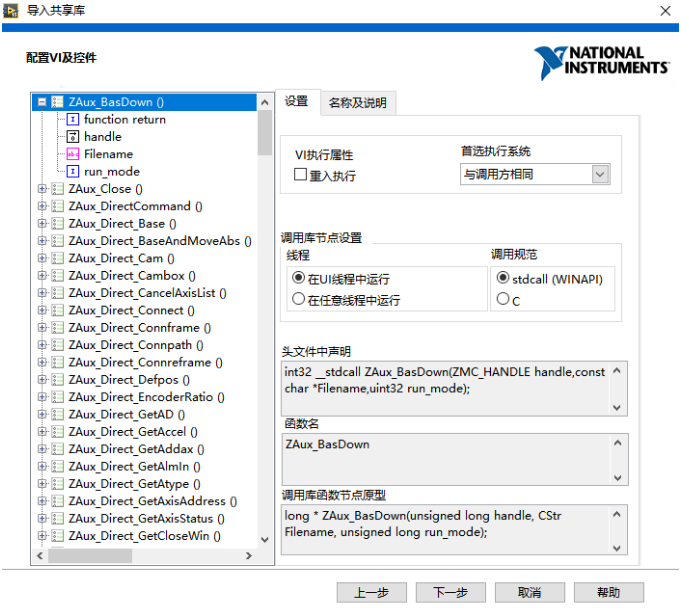
9、配置Vi和控件,这里和.dll一样设置如图。
10、一直选择下一步,等待完成就好。
二、例程讲解
1、我们的光盘资料提供了8个基本常用的小例程,通过这些历程可以更容易的上手正运动技术的控制器。具体的目录地址和例程如下图所示。

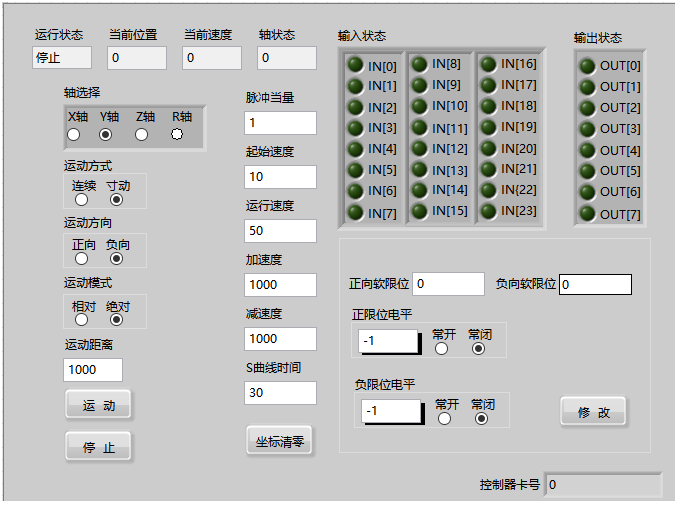
2、单轴运动与IO监控例程讲解
1)新建Vi。
2)在前面板,右键鼠标,选择控件进行UI设计。
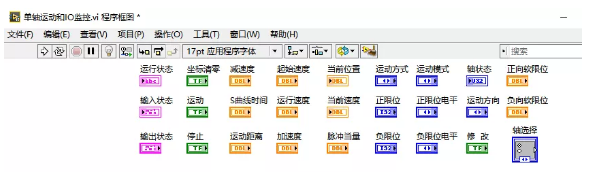
3)在前面板设计完UI界面后,进入程序编辑框,会看到各个控件对应的接线端。
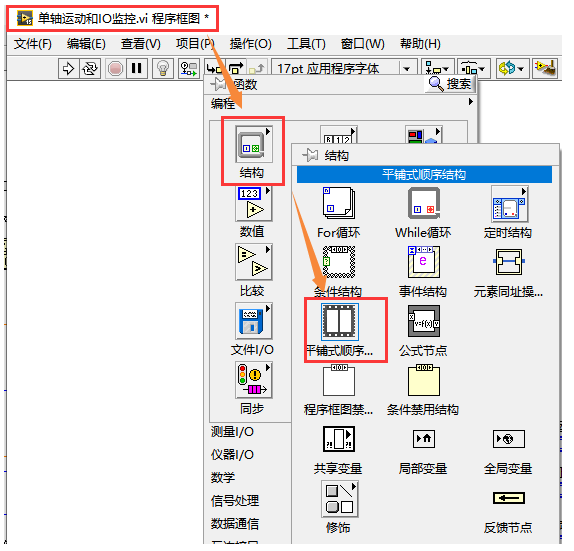
4)在程序编辑框中右键鼠标,选择“编程”-“结构”-“平铺顺序结构”,接着选中平铺顺序结构右键鼠标,选择在前面添加帧,做到如下效果。

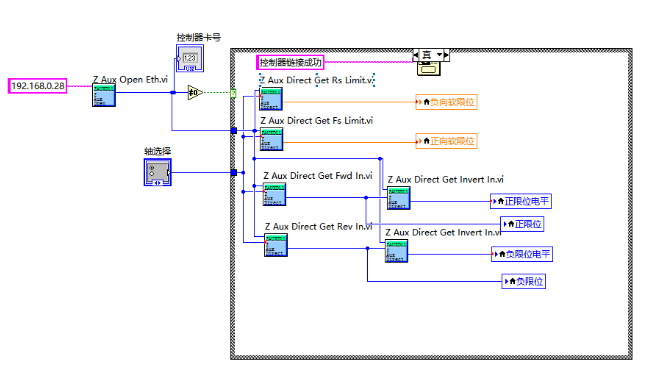
5)使用ZAux Open Eth.Vi链接控制器。
A、在平铺顺序结构第一帧,添加数值常量和局部变量(控制器卡号),然后通过连线对控制器卡号进行初始化为0。
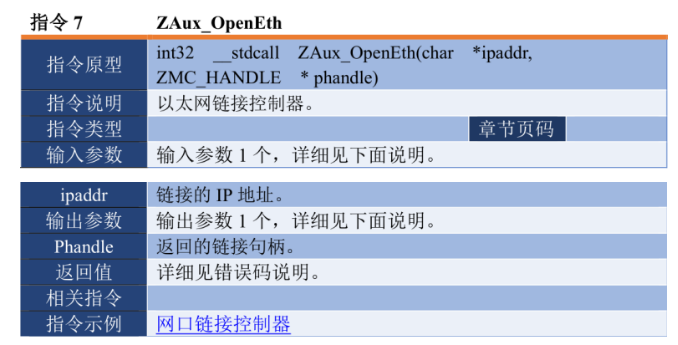
B、右键选择Vi,选择ZAux Open Eth.Vi进行添加。
C、可以参考ZMotion PC 编程手册,大致了解对应Vi的使用方法。
D、给Vi输入控制器Ip,进行链接控制器,如果链接成功,弹出链接成功对话框。

E、运行程序,如果链接成功,将跳出链接成功对话框。
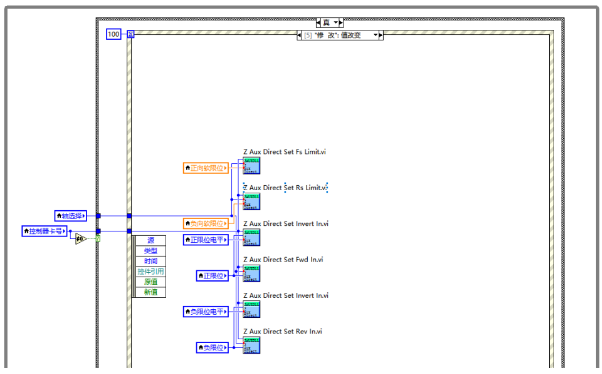
6)链接控制器成功后,获取正/负向软限位、正/负限位开关、以及正/负限位的反转电平。
7)通过事件结构里面的超时事件,来更新一些轴的状态以及输入输出口的状态。

8)添加运动按钮事件实现轴运动。
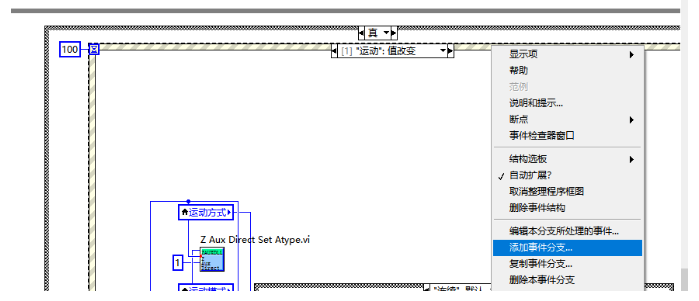
A、先通过鼠标选中事件结构,然后右键添加事件分支。
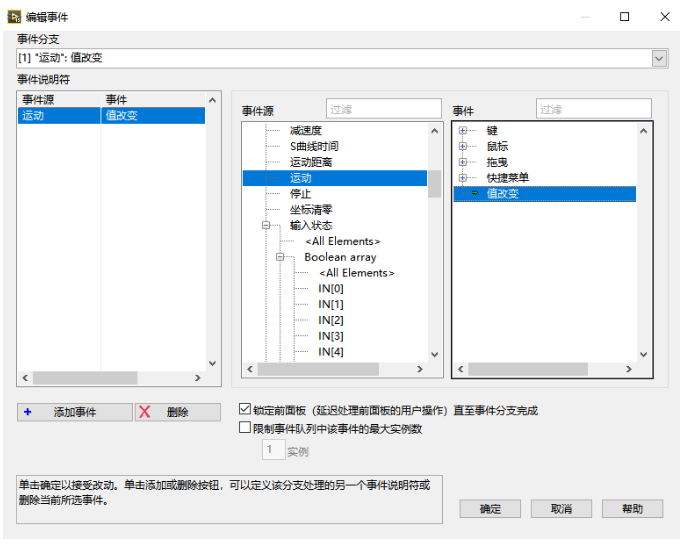
B、接着在弹出来的窗口中编辑刚刚添加的事件分支,添加运动按钮值改变事件,编辑完成后点击确定。
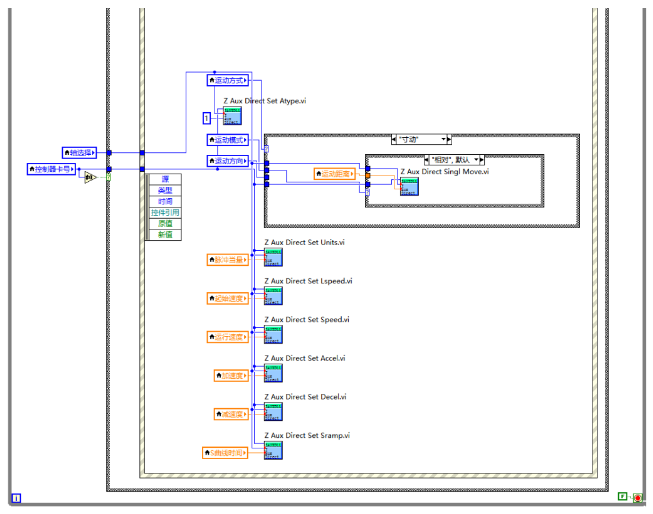
C、接着在“运动”:值改变事件中添加如下程序。
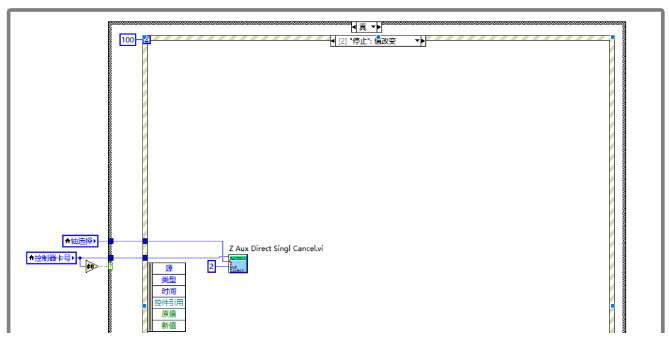
9)参考运动按钮事件的添加过程,添加停止按钮事件,编写对应的程序,程序如下。
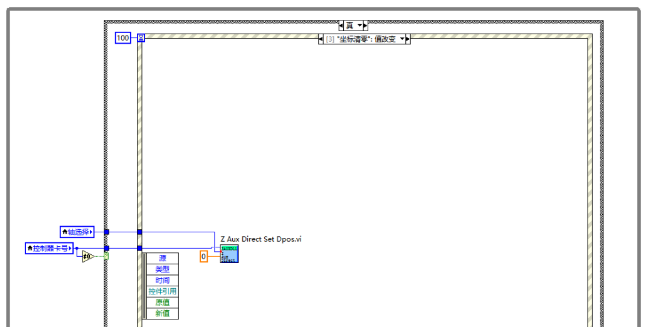
10)参考运动按钮事件的添加过程,添加坐标清零按钮事件,编写对应的程序,程序如下。
11)参考运动按钮事件的添加过程,添加输出状态改变事件,编写对应的程序,程序如下。

12)参考运动按钮事件的添加过程,添加修改按钮事件,编写对应的程序,程序如下。
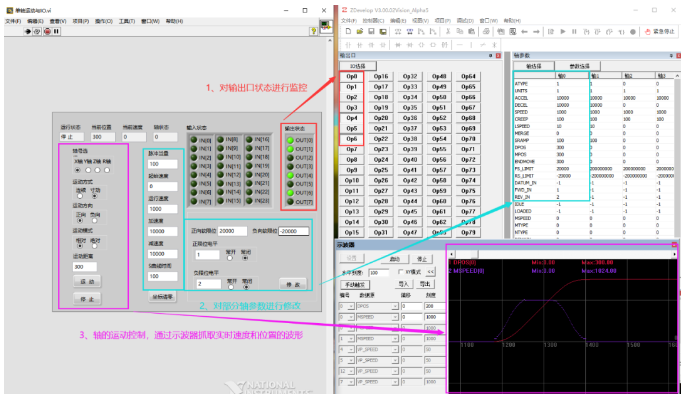
13)到这里例程就设计完了,点击运行按钮就可以对例程进行测试了,效果如下。
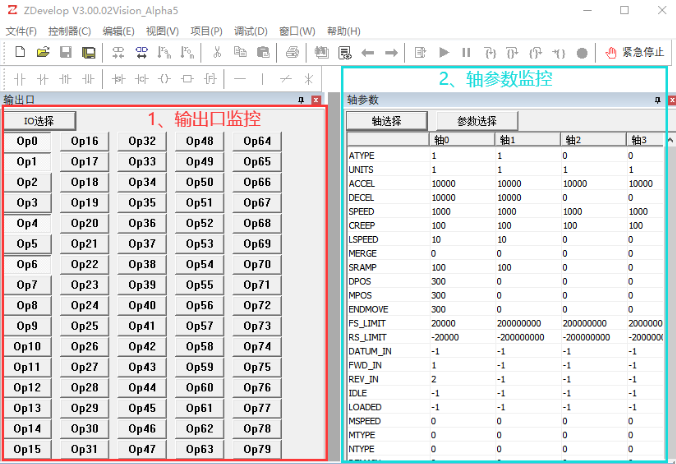
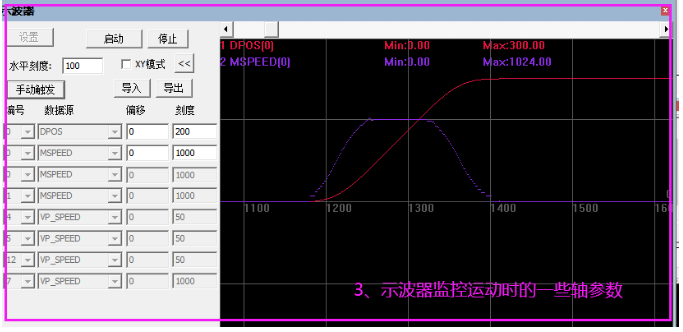
14)同时通过ZDevelop软件连接同一个控制器,对例程的控制效果进行观察。
今天,正运动技术运动控制卡应用开发教程之LabVIEW就分享到这里。更多精彩内容,请关注我们的公众号。
本文由正运动小助手原创,欢迎大家转载,共同学习,一起提高中国智能制造水平。文章版权归正运动技术所有,如有转载请注明文章来源。





楼主最近还看过
- 旋转编码器的分辨率与精度
 [12641]
[12641] - 伺服电机加减速机误差会加大...[5490]
- 松下A4伺服怎么没有Z相输出?[6372]
- 请教:步进电机断电后再次通电...[9382]
- 求plc控制伺服定长追色及色标...[13234]
- 如何避免松下伺服因干扰而自...[8759]
- 解释位置环的作用?[23659]
- 两台伺服电机高速同步问题[6333]
- 齿轮反向间隙怎么补偿??[5403]
- KW跟N.M之间怎么换算[10331]

官方公众号

智造工程师
-

 客服
客服

-

 小程序
小程序

-

 公众号
公众号











 工控网智造工程师好文精选
工控网智造工程师好文精选
