
 无论是否适用于移动应用,机器人技术都取决于运动控制技术。从Roomba真空吸尘器(移动应用)到达芬奇手术机器人系统(非移动应用),需要运动控制来移动任何机器人应用程序。
无论是否适用于移动应用,机器人技术都取决于运动控制技术。从Roomba真空吸尘器(移动应用)到达芬奇手术机器人系统(非移动应用),需要运动控制来移动任何机器人应用程序。
机器人这个词意味着一个完全功能的系统 - 完全自主或至少以某种方式自动化 - 有人为预期目的而建造。工程师将机器人编程为执行某项任务或一系列任务,用户只需要知道如何操作机器人(即了解如何为其提供动力,进行正确选择并按下启动按钮)。
另一方面,运动控制包括一系列组合(例如电子驱动器和控制器,电动机和其他机械),它们共同为系统供电。为了使这些组件根据需要一起工作,需要运动控制技术和应用工程。运动技术的一个关键部分是软件。没有集成到系统中的各种运动软件,组件将只是一堆电气和机械部件。
虽然概念不同,机器人和运动控制工作携手并进。事实上,运动控制是机器人的必要子系统。为了帮助了解这一点,我们在下面分解了运动控制将机器人放在主体中的关键方面。
运动控制确保精度。
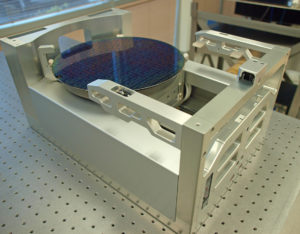
每个企业都追求精准。但对于某些行业来说,精度至关重要。在半导体制造中,例如光学关键尺寸光谱仪是用于光学计量学的关键技术。
OCD能够将最小的半导体设计特征的测量降至纳米级。OCD光谱系统的运动显然必须非常精确。OCD系统当然是自动的(因为它们使OCD过程自动化),因此可能被认为是机器人。
OCD系统的核心是高度集成的多轴定位平台系统,其结合精确的定位力学。伺服电机为系统的各个轴提供动力,而伺服电机由伺服电机控制器供电,与电机一起能够在定位系统中实现高度动态且精确的运动。
它简化了机器人控制系统。
 庞大的低效率控制器使应用程序运行复杂化。在自主车辆中,甚至在使用线控技术的驱动车辆中,车辆的转向(通常是其牵引力)由电子系统和部件代替经典机械系统来提供,以执行其主要功能。
庞大的低效率控制器使应用程序运行复杂化。在自主车辆中,甚至在使用线控技术的驱动车辆中,车辆的转向(通常是其牵引力)由电子系统和部件代替经典机械系统来提供,以执行其主要功能。
高效的运动控制技术用精确,高效的机电控制系统代替了重型,耗电量大的传统机械和液压部件。在这些节能汽车的牵引力,转向和制动系统中,是无刷扭矩电机。
运动控制对现代移动机器人来说至关重要。
 农业现代化农场越来越依赖于运动控制技术。一个例子是用于精确(或半机器人)耕作的基于GPS的转向系统。
农业现代化农场越来越依赖于运动控制技术。一个例子是用于精确(或半机器人)耕作的基于GPS的转向系统。
使用紧凑型直接驱动的无刷扭矩电动机执行器,其具有安装到车辆方向盘的集成伺服电机控制器,并且连接到GPS控制单元,该系统为农业现场设备提供自主的高精度转向。
大多数人可能不认为这是一个机器人系统,但它是机器人自主运行的一种形式,它在很大程度上是通过现代运动控制技术实现的。没有现代化,紧凑,高效的运动控制组件的可用性,精确耕作将会更加困难和昂贵。
其他移动机器人应用程序,如在当今您在某些酒店和较大的零售店中找到的军用和服务机器人使用的IED处理机器人,由于配备动力轮和/或轨道,因此是移动的。这些机器人广泛使用运动控制牵引子系统。





 [12611]
[12611]











 工控网智造工程师好文精选
工控网智造工程师好文精选
