关于台达伺服的若干个问题 点击:31683 | 回复:81






楼主最近还看过
Q2:伺服驱动器输入电源是否可接单相220V ?
A2:台达伺服1.5KW(含)以下可接单相/三相220V电源,2.0KW(含)以上只能接三相220V电源。三相电源整流出来的直流波形质量更好,质量不好的直流电源会消耗母线上电容的能量,电机急加减速时电容会对母线充放电来保持母线电压稳定,因此三相电源输入比单相电源输入伺服的特性会好一些,三相电源输入提供的电流也更大。
Q3:伺服驱动器输出到电机的UVW三相是否可以互换?
A3:不可以,伺服驱动器到电机UVW的接法是唯一的。普通异步电机输入电源UVW两相互换时电机会反转,事实上伺服电机UVW任意两相互换电机也会反转,但是伺服电机是有反馈装置的,这样就出现正反馈会导致电机飞车。伺服驱动器会检测并防止飞车,因此在UVW接错线后我们看到的现象是电机以很快的速度转过一个角度然后报警过负载ALE06。
Q4:伺服电机为何要Servo on之后才可以动作?
A4:伺服驱动器并不是在通电后就会输出电流到电机,因此电机是处于放松的状态(手可以转动电机轴)。伺服驱动器接收到Servo on信号后会输出电流到电机,让电机处于一种电气保持的状态,此时才可以接收指令去动作,没有收到指令时是不会动作的即使有外力介入(手转不动电机轴),这样伺服电机才能实现精确定位。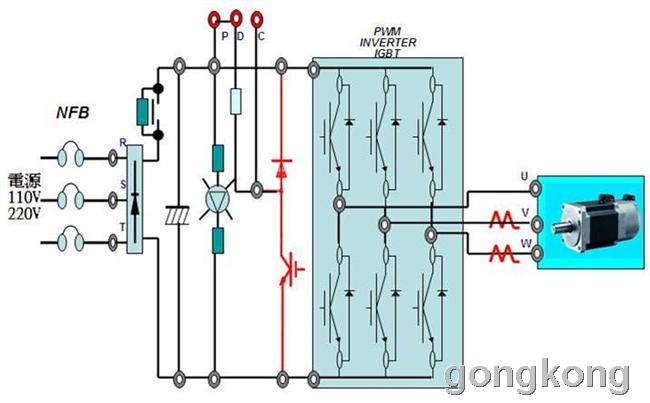
回复本条
-
Q5:伺服驱动器上电就报警ALE14如何处理?
A5:ALE14是正向极限异常报警,因为出厂参数设置正反向极限和紧急停止这些保护性的DI点都是常闭接点,在没有信号时则会报警。在上位控制器已经连接了这些保护信号或者不需要这些保护信号时可通过以下方法消除报警:参数P2-15设为122或0,或者直接短接DI点。
Q6:伺服驱动器上电就报警ALE11如何处理?
A6:出现ALE11报警的原因有:编码器线接线错误、电机编码器故障、驱动器硬件故障。
Q7:伺服驱动器报警ALE06如何处理?
A7:出现ALE06报警的原因有:UVW线连接相序错误、负载过大、增益设置过高、电机编码器异常。通过参数P0-02设置为11可在驱动器面板上监视伺服电机平均负载率,如果平均负载率持续在100%以上则会出现过负载报警,技术手册上可查到不同电机的过负载特性。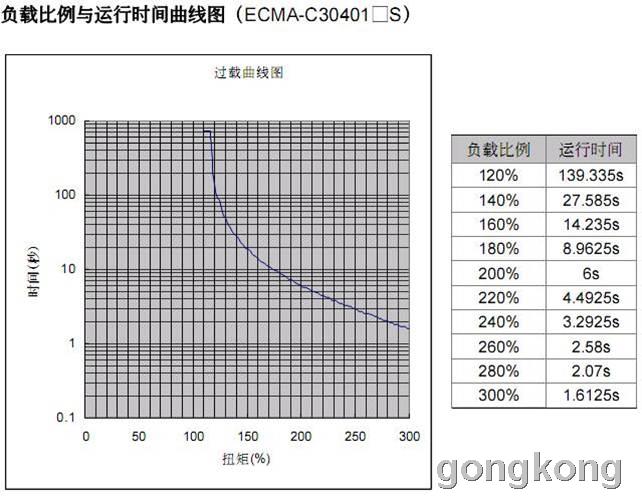
回复本条
-
Q8:伺服驱动器报警ALE09如何处理?
A8:出现ALE09报警的原因有:UVW接线缺相导致马达出力不足、增益设置过低、扭矩限制过低、指令频率过高或电子齿轮比过大导致马达到达最高转速限制(P1-55)、电机编码器故障。
Q9:脉冲指令结束电机仍在运行是什么原因?
A9:脉冲指令平滑参数P1-08设置过大导致指令严重滞后,会出现指令结束后马达仍在运行的状况。通过台达伺服软件内置示波器功能监测指令脉冲和编码器反馈脉冲,可看到电机的运行情况。在电子齿轮比设置比较大时,适当设置参数P1-08可让电机运行更加平稳。
Q10:伺服驱动器报警ALE04如何处理?
A10:AB系列伺服驱动器配ECMA马达时功率不匹配上电会报警ALE04,除这种情况外刚一上电就报警ALE04就是电机编码器故障。如果在使用过程中出现ALE04报警是因为编码器信号被干扰,请查看编码器线是否是屏蔽双绞、驱动器与电机间地线是否连接,或者在编码器线上套磁环。通过ALE04.EXE软件可以监测每次Z脉冲位置AB脉冲计数是否变化,有变化则会报警。
回复本条
-
Q11:伺服驱动器报警ALE01如何处理?
A11:检查UVW线是否有短路。如果把UVW线与驱动器断开再通电仍然出现ALE01则是驱动器硬件故障。
Q12:如何知道一台带刹车的电机打开刹车需要多大电流?
A12:在技术手册第11章电机规格中可以查到不同功率电机刹车所消耗的功率,刹车动作时间等。
Q13:通过通讯频繁写入参数时怎样防止EEPROM被写坏?
A13:每次写参数前先通过通讯写入P2-30=5,之后写入的参数只会存储在RAM而不会写入EEPROM,参数掉电不保持,这样可以提高EEPROM的寿命。
Q14:台达伺服与西门子S7-200如何接线?
A14:接收脉冲指令的接线图如下,台达伺服DI信号是可以双向输入的。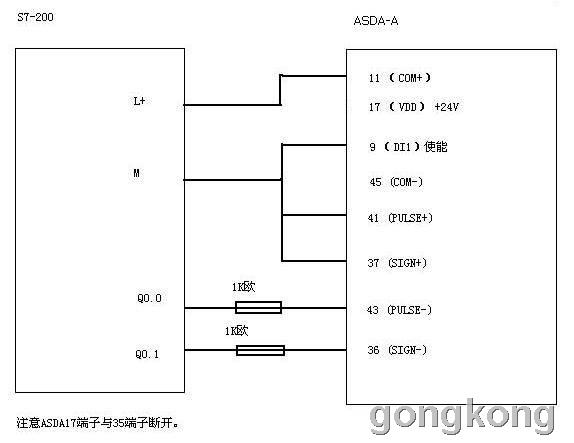
回复本条
-

Q15:伺服工作在速度模式下通过电位器来调节转速时,当电位器输出电压调到0V电机仍会慢慢转动,这是什么原因?
A15:这是因为有零漂,可以通过启动零速钳位功能来解决。设DI2对应的参数P2-11=5即可启动这个功能(ZCLAMP),参数P1-38可设定零速准位。当使用中达电通模拟量指令数控系统时,伺服一定不能启动这个功能。
Q16:台达伺服在调整增益时,参数P1-37是否有作用?
A16:台达伺服除ASDA-A / AB两个系列驱动器外,其他系列伺服驱动器中负载惯量比参数P1-37都是起作用的。如果对台达增益参数不熟悉,建议使用台达伺服软件自带的增益计算功能。
Q17:台达伺服软件中增益计算功能怎样使用?
A17:在软件画面中设定“频宽”“惯量比”后点击“计算增益”就会计算出合适的增益,“惯量比”是带负载后驱动器监测到的,再根据不同的响应性要求设定不同的“频宽”,频宽低时电机运行比较柔和,频宽高时电机响应性更好但动作也更加剧烈。
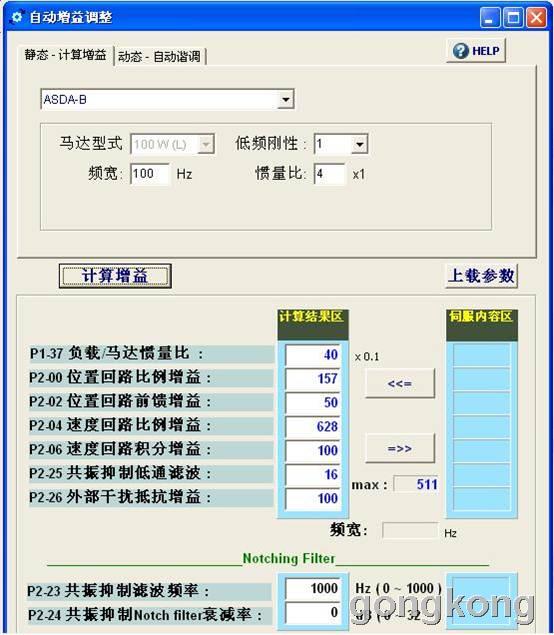
小技巧:
负载惯量比低时频宽可以设大一些,负载惯量比大时频宽一定要设小。
回复本条
-
Q18:如何估测负载惯量比?
A18:参数P0-02设14可在驱动器面板上监视负载惯量比。通过JOG或上位控制器指令让伺服电机带动负载频繁正反转,监测到的负载惯量比会趋于稳定,在不同的增益条件下估测到的值可能不一样。估测负载惯量比时要求0-2000rpm加速时间在1S以下,运转速度200rpm以上。
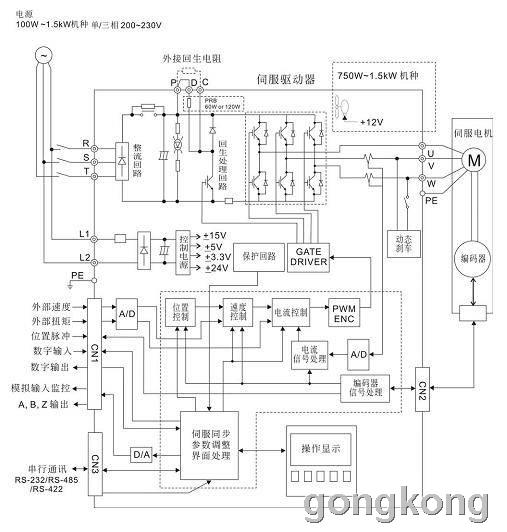
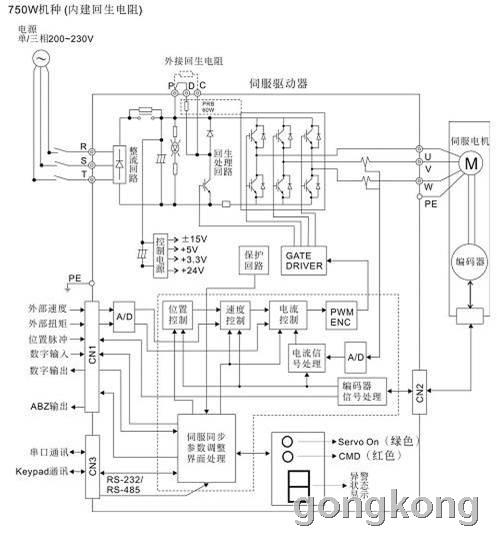
Q19:怎样确定是否需要外接回生电阻?
A19:一般伺服驱动器都内置回生电阻,当伺服驱动器报警ALE05时需要外接回生电阻。台达B系列驱动器400W(含)以下和A+系列驱动器5.5KW(含)以上无内置回生电阻。
Q20:怎样外接回生电阻?是否需要再设参数?
A20:根据技术手册推荐选择合适的回生电阻,把驱动器上P、D脚短接片取下,把外部电阻连接到P、C脚之间,把电阻阻值/功率设到参数P1-52/P1-53。
Q21:选择伺服电机大小时需要考虑哪些因素?
A21:
连续工作扭矩 < 电机额定扭矩
加速时扭矩 < 电机最大扭矩
负载惯量 < 3倍电机转子惯量
连续工作速度 < 电机额定转速
Q22:一个直径100mm重量20kg的圆柱体以轴心线为中心旋转时的转动惯量为多少?假设一个伺服电机经过1:10的减速机后连接到这个圆柱体,那么折算到伺服电机轴上的转动惯量为多少?
A22:圆柱体转动惯量J=1/2*M*R2=1/2*20*25=250kg.cm2
经过减速比之后折算到电机轴上的转动惯量会减小减速比的平方倍,折算到电机轴上的转动惯量J2=250/100=2.5kg.cm2
Q23:伺服电机通过滚珠丝杆带动100kg的负载,滚珠丝杆重量20kg/直径20mm/导程10mm,滚珠丝杆为垂直安装,不考虑摩擦力因素伺服电机提升这个负载最少需要输出多少扭矩?
A23:伺服电机需要扭矩T=M*g*PB/2π=100*9.8*0.01/6.28=1.56N.m
M-负载重量 g-重力加速度 PB-滚珠丝杆螺距
Q24:伺服电机带负载运行一下停下来会来回晃动是什么原因?
A24:负载惯量太大。使用增益计算软件将频宽设小,惯量比设大,重新计算增益。惯量比的设置最好是驱动器实际估测到的值。
Q25:PLC发脉冲给伺服,电机为什么不转?
A25:这种情况下电机不转的原因有很多,需要一级一级排查原因。首先要确认的是通过伺服驱动器JOG电机是否会动作,然后再确认伺服的工作模式/接收脉冲指令型式/接线。
Q26:手动JOG时电机为什么不转?
A26:以下情况经常导致通过驱动器JOG时电机不转:
伺服没有servo on,最简单的方法是用手转动电机轴来确认;
驱动器与电机间UVW动力线未连接;
驱动器与电机间UVW动力线相序连接错误导致06报警;
Q27:PLC发脉冲给伺服,电机转速在100rpm以下时转速与频率成正比,但发更高频率脉冲时电机转速却下降了,这是什么原因?
A27:一般PLC的脉冲输出频率为10K,在伺服没有设电子齿轮比的情况下10000个pulse电机转一圈,10K的指令脉冲电机转速为60rpm。如果没有注意到PLC脉冲输出频率的限制,编程发送更高频率的脉冲就可能导致PLC实际输出脉冲异常。
Q28:伺服在开机工作时都很正常,在断电时控制器也没发脉冲,为什么伺服电机会动一下?
A28:断电瞬间可能有高频杂波通过控制线进入伺服驱动器,如果伺服仍然在servo on的状态就会把杂波当成脉冲指令,因此伺服电机会有动作。可以通过设置参数P1-00.Y这一位(bit)来过滤高频杂波。另外在一些发模拟量指令控制伺服的系统中也会有相同的情况,比如中达数控系统,如果在servo on时整个系统断电伺服也会有动作,而且很剧烈。
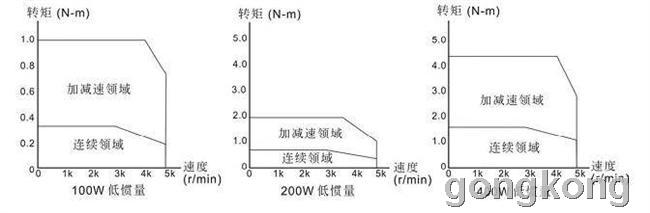
Q29:如果想替换一台保持转矩为10N.m的步进电机应该选多大扭矩的伺服电机?
A29:保持转矩是指步进电机通电但没有转动时,定子锁住转子的力矩。通常步进电机在低速时的力矩接近保持转矩,步进电机的输出力矩随速度的增大而不断衰减。因为步进电机没有过载能力,一般我们选一款额定扭矩是步进电机扭矩三分之一的伺服电机即可。
Q30:如果想替换一台普通的1KW四极异步电机应该选择多大功率伺服电机?
A30:普通异步电机与伺服电机之间没有简单的对应关系,基本上可以说两者控制要求完全不一样。这种情况下只能通过计算负载的惯量/扭矩/转速等方式来选择伺服电机。
Q31:伺服电机正转碰到正向限位后会停下来,为什么这时发反向脉冲电机却不会反转回来?
A31:伺服电机正转碰到正向限位后会停下来,驱动器显示报警ALE14,如果此时命令脉冲没有停止伺服接下来会发生追随误差过大报警ALE09,因为ALE14在前所以ALE09不会显示出来,这样再发反向脉冲伺服就不会动作了。ASDA-AB系列伺服可将参数P2-65的bit13置ON,这样正向限位后就不会再接收正向脉冲,反向限位后就不会再接收反向脉冲。ASDA-B系列伺服没有这样的功能。
Q32:在正常使用时因为启停频率很高导致电机温度很高,这样长期使用电机是否会损坏?
A32:伺服电机编码器温度达到85摄氏度以上时就会损坏。伺服电机转子温度达到130摄氏度以上就会出现退磁现象,因为伺服电机里外的温差,差不多电机本体表面温度85摄氏度时电机内部温度130度。在伺服电机起停频繁的场合,可能出现伺服电机温度很高的情况,此时需要在外部采取强制冷却的措施。
Q33:伺服驱动器模拟量输入的解析度是多少?
A33:-11v~11v为12bit,-0.6875v~0.6875v为11bit。
Q34:台达伺服使用的环境温度是怎样?零下20摄氏度是否可以工作?
A34:台达伺服驱动器使用环境温度0~50摄氏度,伺服电机使用环境温度0~40摄氏度。如果环境温度高于这个范围必要加强空气流动保证散热。零下20摄氏度时我们不保证伺服能正常工作,需要用户自己去试验。
Q35:伺服电机带负载停下来时会晃动,感觉电机力不够停不下来,如果换带刹车的电机是不是会好一些?
A35:伺服电机自带的刹车不是用来让电机减速的,是用于在断电的情况下防止电机轴受外力影响转动,比如垂直安装的场合。
Q36:Q:台达伺服如何变更控制模式?
A36:将参数P1-01设定为所欲控制之模式后(参考下表) ,设定好参数后,需将伺服驱动器重新上电后 ,便已修改控制之模式。
Pt:位置控制模式(命令由端子输入)
Pr:位置控制模式(命令由内部缓存器输入)
S:速度控制模式(端子/内部缓存器
T:扭矩控制模式(端子/内部缓存器)
Sz:零速度/内部速度缓存器命令
Tz:零扭矩/内部扭矩缓存器命令
Q37:ALE02过电压/ALE03低电压报警发生时如何处理?
A37:首先使用万用表测量输入电压是否在允许范围内;再次是通过驱动器或伺服软件示波器监视“主回路电压”,这是直流母线电压,电压伏数应该是输入交流电压的1.414倍,正常来讲应该不会有太大的偏差。如果偏差很大需返厂重新校准。ALE02/ALE03报警是以“主回路电压”来判断的。
Q38:在高速运行时机台在中途有很明显的一钝,观察发现是中途有ALE03报警产生,但是一闪就消失了,如何解决这个问题?
A38:在高速运行时会消耗很大能量,母线电压会下降,如果输入电压偏低此时就会出现ALE03报警。报警发生时伺服马上停止,母线电压恢复正常,报警自动消失,伺服会继续运行,因此看起来就是明显的一钝。这种情况多发生在使用单相电源供电时,建议主回路使用三相电源供电。参数P2-65 bit12置ON可使ALE03报警发生时,母线电压恢复后报警不会自动消失。
Q39:PLC通过脉冲+方向的方式控制伺服时,电机始终只能朝一个方向转会是什么原因?
A39:①参数脉冲型式设置错误,设为AB相脉冲或CW/CCW脉冲就会出现这种情况;②接线错误导致驱动器没有收到方向信号;③驱动器接受方向信号的光耦烧坏,这个回路正常输入电压是5V,如果不小心把12V或24V脉冲信号接进来,因为方向信号基本是常ON所以比接收脉冲的回路容易烧坏。
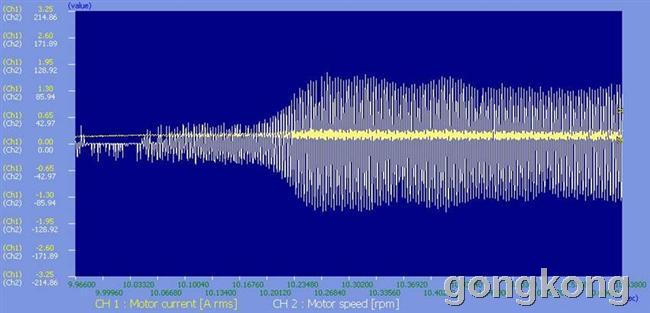
Q40:当增益设置太高引起机械共振时如何查找共振频率?
A40:使用伺服软件示波器功能监视“马达电流”(或者平均负载率),如果发生共振可监视到如下图明显的振荡,在软件中勾选“显示频谱资讯(FFT)”后再框选需要分析的区域,明显有凸起的地方就是共振点。

回复本条
-
Q41:使用带刹车的电机安装在垂直的Z轴上时,当servo-off时机头会往下掉一点刹车才吸合,如何解决这个问题?
A41:正确的接线方式下电机的刹车是由驱动器DO信号BRKR来控制打开和关闭的,在servo on时驱动器会输出信号打开刹车,servo off时会关闭刹车。把电磁刹车关闭延迟时间P1-43设为负值,可在servo on断开前先闭合刹车,这样就可以防止机头往下掉。

Q42:伺服工作在扭矩模式下时,如果电机被外力带着与电机出力相反的方向长时间运行是否会造成电机损坏?
A42:这种运行状况不会造成电机损坏。
Q43:在位置模式(Pt)下伺服参数中的加减速时间设定是否起作用?
A43:伺服参数中的加减速时间在Pt位置模式下不起作用,只有在Pr内部寄存器位置模式和速度模式下起作用。
Q44:参数P2-22=7是设定DO5为报警输出常闭信号,为什么发生正向极限限位报警时这个信号没有输出?
A44:台达伺服报警分ALARM(功能码07)和WARN(功能码11),正反向极限限位、紧急停止、通讯异常、低电压、风扇异常这些报警是通过WARN这个报警输出的,其余的报警都是通过ALARM这个报警输出的。
Q45:当伺服发生报警时,是否可以在不断电的情况下清除报警?
A45:只有少数报警需要重新上电才能清除,大多数报警可以通过DI清除,还有少数报警在条件满足后会自动清除,具体请参考技术手册第十章。
Q46:为什么参数P2-08设成10后重新上电伺服还是没有恢复成出厂值?
A46:可能是在servo on的情况下操作的,如果servo on时P2-08设10是不能恢复出厂值的。有些参数在servo on时是不能写入的,在参数写入时面板上会有相应的提示,只有提示-END-时才表示参数正常写入,还有一些提示如下。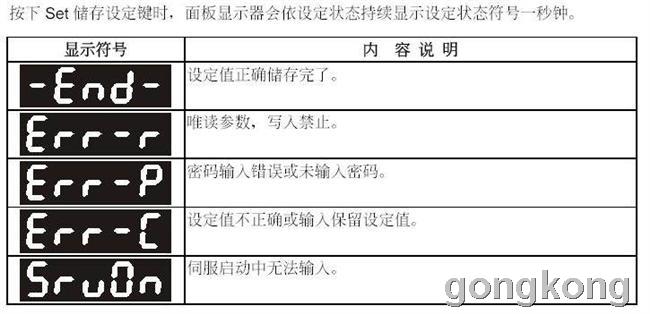
回复本条
-





- 三菱的伺服用于转矩控制模式...
 [6042]
[6042] - 可以使伺服电机轴锁住(处于控...[5834]
- 伺服与PLC的通讯和控制[7212]
- 伺服电机编码器线、信号线最长...[23212]
- RESOLVER与编码器[7990]
- 关于伺服电机在高速运转时,如...[11897]
- 求救:为什么伺服电机发烫?[8478]
- 伺服电机驱动器的结构组成[6197]
- 各数控厂家系统比较 [10412]
- 伺服电机换向究竟有多快?请高...[8660]

官方公众号

智造工程师
-

 客服
客服

-

 小程序
小程序

-

 公众号
公众号











 工控网智造工程师好文精选
工控网智造工程师好文精选
