【KEWEI】科威KS4系列交流伺服驱动器使用说明(十三) 点击:149 | 回复:0

发表于:2023-02-24 09:52:29
楼主
一、工作时序
1. 使能与报警时序图
使能与报警时序说明:
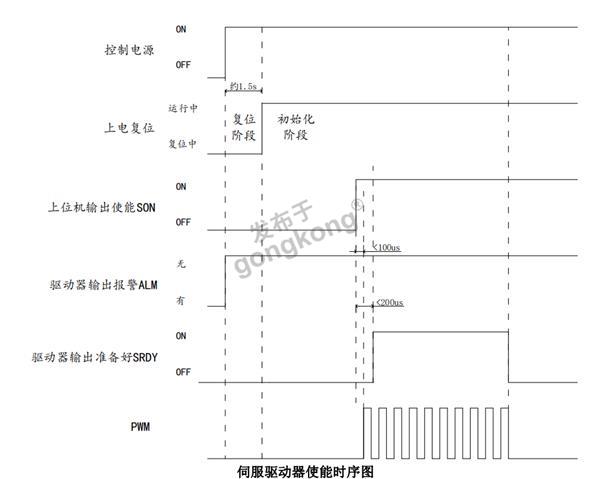
1) 复位阶段
控制电源上电后,约 1.5s 为系统复位时间。在复位阶段中,驱动器不响应任何外部输入。
2) 初始化阶段
复位完成后为系统初始化阶段。在初始化阶段中,驱动器不响应任何外部输入(包括外部 使能 SON)及内部使能,但会响应初始化过程中出现的报警(例如 Err-5、Err-6、Err-7)。一旦在初始化阶段检测到报警,伺服驱动器会立即输出报警信号,同时 SFDY 伺服准备好信号一直处于未准备好状态。
3) 开始正常运行
初始化过程结束后,系统开始正常工作。一旦驱动器接收到控制系统发送的 SON 使能信号后,如果没有报警异常,约 200us 后驱动器会回发 SRDY 伺服准备好信号给控制系统,同时锁定电机,并允许响应外部输入。控制系统接收到伺服驱动器回发的 SRDY 伺服准备好信号后, 再发送位置或速度指令给驱动器,开始正常运行。
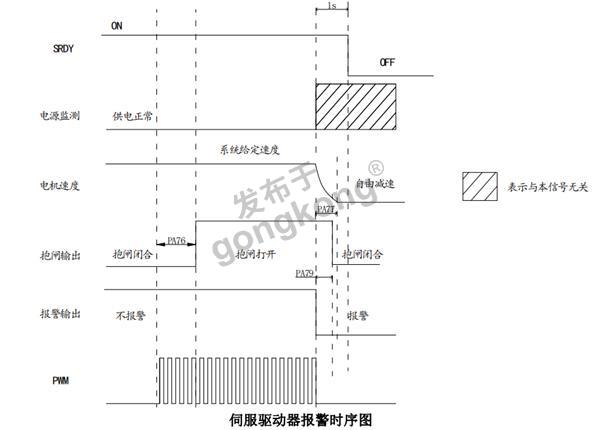
4) 在正常运行过程中,撤消 SON 伺服使能信号或发生报警
在正常运行过程中,一旦撤消 SON 伺服使能信号或发生报警,驱动器立即撤消对电机的控制,并不再接收外部位置或速度指令,同时撤消 SFDY 伺服准备好信号输出。一旦恢复 SON 伺服使能信号或报警清除,则后续按流程 3)进行。








楼主最近还看过
热门招聘
相关主题
- 交流伺服电机力矩计算
 [5496]
[5496] - 请教一个六根线的步进电机接...[8575]
- 交流伺服电机能不能当普通电...[5699]
- 速度控制模式用模拟控制伺服...[10620]
- 步进电机,每秒100次起停,每次...[6617]
- 控制器的带宽[6856]
- FOC控制方式和六步换向方式哪...[5694]
- 松下伺服怎么不能试运行?怎么...[11204]
- 埃斯顿的伺服性能如何?[10815]
- 请教关于伺服电机转矩控制模...[7628]

官方公众号

智造工程师
-

 客服
客服

-

 小程序
小程序

-

 公众号
公众号











 工控网智造工程师好文精选
工控网智造工程师好文精选
