高创总线伺服回零失败问题解决方法参考 点击:2739 | 回复:3

发表于:2023-02-21 15:53:02
楼主
产品型号:正运动技术全系列EtherCAT总线控制器
问题与现象描述:
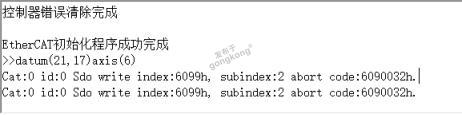
高创伺服搭配直线电机,总线初始化成功后,控制器在线命令datum(21,mode2)回零报错,伺服返回中止码。
排查:
高创伺服软件单独回零,测试正常,第一速度10rps,第二速度5rps。
但注意到总线初始化后第一回零速度被修改为1rps,第二速度5rps。
考虑参数对应关系。

解决:
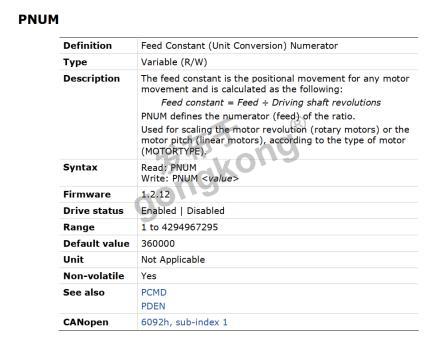
仪表板-终端输入pnum查询伺服每圈脉冲数,根据机械结构求出每mm对应的脉冲数,将控制器里units的值设为和该值相等,统一单位后回零有效。
实际本次排查中pnum=600000,询问伺服厂家对应10000pul/mm,将units设为10000后伺服不会返回中止码且能正常回零。
而此前units设置1000,速度10,写入6099的速度值为10000pul/s,对应监控到的第一速度1rps,推测问题原因是写入的速度值小于伺服内6099的参数限制,因此对于高创或其他出现类似现象的伺服,控制器参数最好和伺服内对应。






楼主最近还看过

发表于:2023-02-21 15:54:18
2楼
点击正运动技术官网:http://www.zmotion.com.cn/pro_class_28.html 或拨打 400-089-8936 获取更多学习资料和产品资料
更多精彩内容请关注“正运动小助手”公众号。
热门招聘
相关主题
- 普通的PLC能够现实插补吗?
 [18896]
[18896] - 三菱的伺服用于转矩控制模式...[6043]
- 求助:plc如何控制多台步进电...[6073]
- 独立的运动控制器,与伺服驱动...[5934]
- 请教张力控制的问题[8176]
- 求救:为什么伺服电机发烫?[8479]
- 三菱fx3u 做追剪控制[5435]
- 伺服驱动器倍频技术与电子齿...[5365]
- 伺服在位置控制模式下,能不能...[6800]
- 谁了解印刷机械的运动控制[10172]

官方公众号

智造工程师
-

 客服
客服

-

 小程序
小程序

-

 公众号
公众号











 工控网智造工程师好文精选
工控网智造工程师好文精选
