【KEWEI】科威KS4系列交流伺服驱动器使用说明(八) 点击:76 | 回复:0

一、位置控制
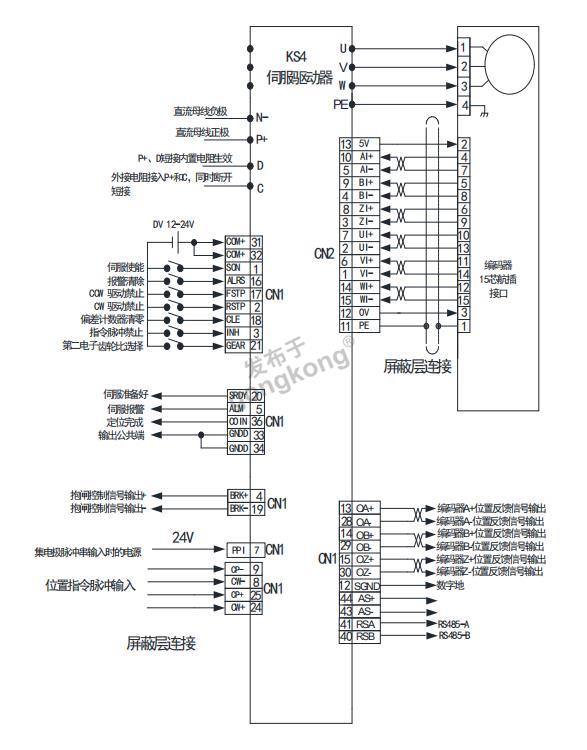
位置控制应用于需要精密定位的系统中,位置指令来源是脉冲指令,由输入端子的 CP+、CP-和 CW+、CW-输入脉冲。用户需根据位置控制接线图的说明,结合实际使用要求正确接线, 然后设置位置控制相关参数。现给出一种简单例子如下:
1. 位置控制接线图
本例的参数设置如下:(其他参数使用出厂缺省值)

2. 位置指令
1. 与位置指令有关的参数
 (八).png")
2. 指令脉冲传输路径
 (八).png")
3. 指令脉冲输入方式
输入方式由参数PA14决定,参数PA15用于变更脉冲输入方向,设置为非0取反。
 (八).png")
![]()
![]()
![]()
![]() 注:箭头表示计数沿,且 PA15=0 时。
注:箭头表示计数沿,且 PA15=0 时。
4. 平滑滤波
 (八).png")
如下图所示,参数 PA18 是对指令脉冲进行平滑滤波,具有指数形式的加减速。滤波器不会丢失输入脉冲,但会出现指令延迟现象。当设置为 0 时,滤波器不起作用。参数值表示由 0 频率上升到 63.2%的位置指令频率的时间。
 (八).png")
滤波器使输入的脉冲频率平滑化。此滤波器用于:上位控制器无加减速功能、电子齿轮比 较大、指令频率较低等场合。
3. 电子齿轮的设定
1. 电子齿轮比基本说明
通过电子齿轮可以定义输入到伺服的单位脉冲命令使传动装置移动任意距离,上位控制器所产生的脉冲命令不需考虑传动系统的齿轮比、减速比或电机编码器线数。下表是电子齿轮变量说明:
 (八).png")
![]() 计算公式:
计算公式:
 (八).png")
将上面计算结果进行约分,并使分子和分母都小于或等于 32766 的整数值,写入参数中
(PA12/PA13)。
2. 电子齿轮比动态切换功能
驱动器提供 2 组电子齿轮比,可以在线改变,由输入的 CN1-21(GEAR)的状态 决定。
 (八).png")
注: 0 表示 OFF, 1 表示 ON
4. 位置控制有关增益
 (八).png")
因为位置环包括速度环,依照先内环后外环次序,首先设置好负载转动惯量比,再调整速度环增益、速度环积分时间常数,最后调整位置环增益。 以下是系统的位置控制器,位置环增益 Kp 增加可提高位置环频宽,但受速度.
 (八).png")
环频宽限制。欲提高位置环增益,必须先提高速度环频宽。
前馈能降低位置环控制的相位滞后,可减小位置控制时的位置跟踪误差以及更短的定位时间。前馈量增大,位置控制跟踪误差减小,但过大会使系统不稳定、超调。若电子齿轮比大于 10 也容易产生噪声。一般应用可设置 PA10 为 0%,需要高响应、低跟踪误差时,可适当增加,不宜超过 80%。








楼主最近还看过
- 伺服电机带刹车怎么接线
 [10123]
[10123] - 格雷码编码器问题[5470]
- 伺服控制器和伺服电动机是开...[10932]
- 求助:为什么伺服电机空载运转...[5425]
- 两台伺服电机高速同步问题[6333]
- 关于伺服编码器接线错误使编...[7949]
- 埃斯顿伺服常见现象报警及排...[20803]
- 直流电机的UVW相[9831]
- electronic cam[5836]
- x轴跟随误差过大引起的程序不...[5433]

官方公众号

智造工程师
-

 客服
客服

-

 小程序
小程序

-

 公众号
公众号











 工控网智造工程师好文精选
工控网智造工程师好文精选
