请大神帮忙看下画的有问题吗?控制功能完善吗? 点击:3382 | 回复:9

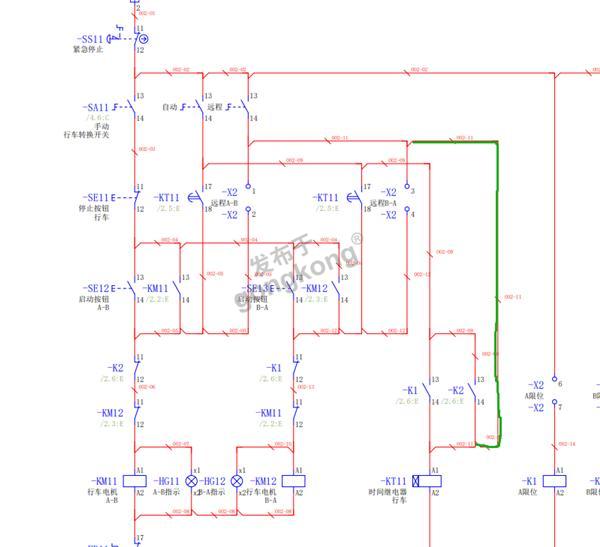
1、 开始端(A处),电磁阀关闭,真空泵工作,控制真空泵的时间继电器开始读数(以分钟计),行车电机反向行走,到(B处),行车停止,时间继电器工作(以小时计),电磁阀打开,控制电磁阀时间继电器开始读数(以秒计)。行车电机正向行走,真空泵工作,控制真空泵的时间继电器开始读数(以分钟计),到(A处),行车停止,时间继电器工作(以小时计),电磁阀打开,控制电磁阀时间继电器开始读数(以秒计)。进行下一循环或等待。
每个工作循环的间隔时间可调(以小时计)
2、以上所有开关均为“接近开关”,交流、95~220V
3、电磁阀,真空泵,行走电机分就地,自动,远程控制。
就地受按钮控制,自动受时间继电器控制,远程受远程控制信号控制
电磁阀就地控制时,受按钮控制;自动控制时,受时间继电器控制,当行车到A处或者B处时,电磁阀打开,时间继电器读数;远程控制时,电磁阀随时都可以打开。
真空泵就地控制时,受按钮控制;自动控制时,受时间继电器控制,当行车从A到B或者从B到A时,真空泵工作,时间继电器读数;远程控制时,真空泵随时都可以打开。
行走电机就地控制时,受按钮控制;自动控制时,受时间继电器控制,当行车到A或者B处时,行车停止,时间继电器读数;远程控制时,行车在任何位置都可以停止,到A或者B位置时,行车停止,时间继电器工作
 正在下载,请等待……
正在下载,请等待……







楼主最近还看过


咱就是个萌新工程师,好奇就来讨论一下~~~~先说一下我捋出来的逻辑:
全拧手动情况下:
1,电磁阀:起保停。
(没啥问题)
2,真空泵:起保停。
(没啥问题)
3,行走电机:起保停+电机到位自动停止。
(没啥问题)
全拧自动情况下:
1,电磁阀:在A、B任意一点时阀启,在离开A/B行程开关范围后延时掉电(T31),延时过后阀停。
(除了与方案一开头“开始端(A处),电磁阀关闭”有冲突以外,其他没啥。有冲突是因为电磁阀只要在A端就会阀开。)
2,真空泵:电机移动(正反皆可)时泵启,在电机停止运动后延时掉电(T21),延时过后泵停。
(与方案描述一致,电机动就启泵)
3,行走电机:在初始位置在中间的话电机不动;初始位置在A/B点时启动延时上电(T11),延时过后电机向B/A点移动,离开行程开关范围后(K1/K2复位)电机停止。
(就~~~应该是走不到B/A,除非行程比较短质量比较大速度比较快传动还用的不是单向传动靠惯性滑过去。因为切到自动这一支路里没有自锁电路,离开行程开关范围后KT11就会掉电,进而对应接触器掉电,电机掉电。想要走到另一端我觉得要么并到手动上去,要么再拿一组KM11/KM12的辅助触点出来给“自动”支路做一个自锁,反正下面有K1/K2常闭到位停止)
全拧远程情况下:
1,电磁阀:点动(接通就启断开就停)
(没啥问题)
2,真空泵:点动
(没啥问题)
3,行走电机:点动,电机到位后只能反向点动。
(没啥问题)
以上,我觉得两个不太合适的点。
"雪夜守护者" 的回复,发表在4楼
对内容: 【"雪夜守护者" 的回复,发表在3楼 对内容: 【咱就是个萌新工程师,好奇就来讨论一下~~~~先说一下我捋出来的逻辑:全拧手动情况下:1,电磁阀:起保停。(没啥问题)2,真空泵:起保停。(...】进行回复:
-----------------------------------------------------------------
首先非常感谢您的帮助,
这是我第一次按照要求来画图。
一开始的状态是:开始端(A处),电磁阀关闭,真空泵工作。
就这一点我还没想到怎么解决,总跟我后面画的冲突,请教了!
是不是还需要一个时间继电器来控制整体循环?
然后我画那根你标注的绿色线,是因为要求说:远程控制时,行车在任何位置都可以停止,到A或者B位置时,行车停止,时间继电器工作。所以我认为是电流经过绿色线走K1或K2闭合再走KT11闭合控制行车正转或反转。现在看来行车离开A或B,K1K2就断了,行车还是停住,是我没考虑到。还是需要您指教指教!
"南京唯友环保科技有限公司" 的回复,发表在5楼
对内容: 【"雪夜守护者" 的回复,发表在4楼 对内容: 【"雪夜守护者" 的回复,发表在3楼 对内容: 【咱就是个萌新工程师,好奇就来讨论一下~~~~先说一下我捋出来的逻辑:全拧手动...】进行回复:
-----------------------------------------------------------------
指教不敢当,就是互相探讨一下。
开始端电磁阀关闭这个我目前也没想出太好的办法。
时间继电器恐怕不太行,除非每步时间都能够有规划。可能需要另一个自锁电路,利用不同条件启停屏蔽掉第一个电磁阀输出。感觉如果用PLC采A端限位下降沿(理想情况下)去置位一个信号会更便利一些。
目前的远程控制没有绿线,对应端子只接一个自复开关就能实现随时停止的功能,我认为没必要加绿线。在远程控制台下再做一个自锁电路也能实现随时停车的功能应该就能实现远端手动控制的功能了。
以上是我的想法

- #德力西电气新品试用#+CJX2s...
 [1406]
[1406] - 37KW电机的额定转速是多少?[4191]
- 请教高手:三相电机如何配漏电...[2689]
- (已结束)电源电器擂台第三十...[1978]
- 万能断路器二次控制图------...[2958]
- 工控电源电器擂台汇总[1166]
- 光耦在线检测秘笈![1694]
- NPN输出与NPN集电极开路输出...[10132]
- 强烈鄙视【施耐德】产品,投诉后...[2737]
- tl494为核心的开关电源带负载...[1493]

官方公众号

智造工程师
-

 客服
客服

-

 小程序
小程序

-

 公众号
公众号











 工控网智造工程师好文精选
工控网智造工程师好文精选
