正运动技术丨UVW对位平台控制算法在视觉引导上的应用 点击:600 | 回复:0

关键词:正运动,UVW 对位平台控制算法
摘要:UVW对位平台,又称XXY、XYR 对位平台,属于三轴并联运动机构。通过3个线性移动轴的并联运动实现 X、Y 两轴线性运动和θz 轴旋转运动。
UVW对位平台介绍
UVW对位平台,又称XXY、XYR 对位平台,属于三轴并联运动机构。通过3个线性移动轴的并联运动实现 X、Y 两轴线性运动和θz 轴旋转运动。

UVW对位平台是高精度视觉对位系统中机械执行部分,主要应用在曝光机、邦定机、光罩印刷机、WAFER 对位、零件安装、PCB 钻孔机、LCD 点灯特性检查、切割机、贴片机(LCD/FPC)、网版印刷机等场合。
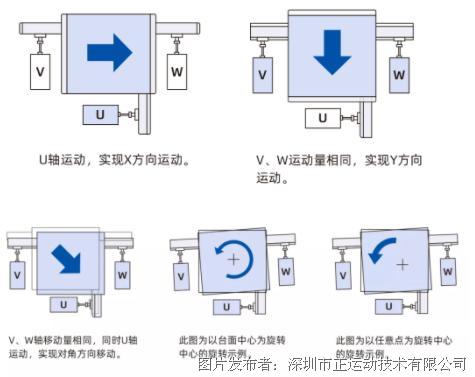
原理
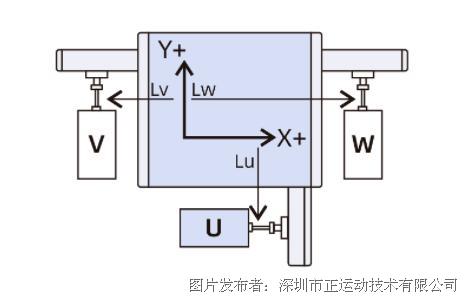
通过安装于同一平面的三个驱动轴的运动,实现定位要求(以下图示均以平台回零后的初始位置为基准)。
正运动技术UVW对位平台算法介绍
正运动技术的UVW平台运动控制算法采用机械手FRAME33模型,可以实现单轴直线运动、两轴线性插补、两轴圆弧插补、空间圆弧等复杂运动。
电机方向及角度范围:虚拟的XY满足右手法则,角度正向与虚拟XY满足右手法则,实际电机轴方向无要求,根据实际情况填写结构参数即可。
1)轴顺序
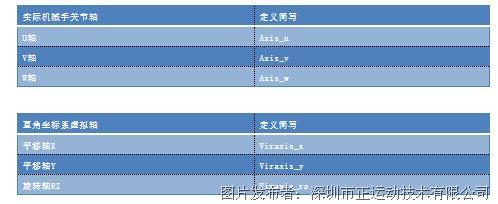
逆解时,将UVW关节轴映射到X,Y,θz 轴的算法。
BASE(Axis_u,Axis_v,Axis_w)
CONNFRAME(33,tablenum, Viraxis_x, Viraxis_y,Viraxis_rz)
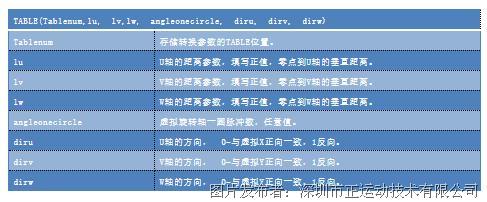
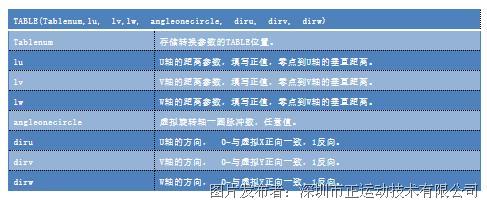
2)结构参数设置
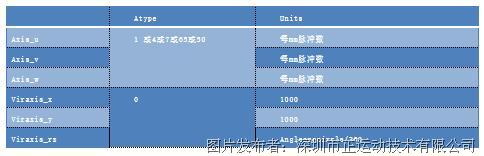
建立机械手连接时,需要将机械结构参数依次填写到table数组中,参数说明如下。
关节轴电机参数设置,各轴的轴类型和脉冲当量要设置正确。
一个机械手的所有虚拟轴和关节轴的长度单位要求统一,一般都是mm单位。虚拟轴的一个mm的脉冲数一般建议设置为1000,表示精度为小数点后3位。
3)零点位置
保证VW轴是水平的。平台上任意一点可作为零点,保证结构参数Lu、Lv、Lw等机构参数正确即可。
4)逆解模式
BASE(Axis_u,Axis_v,Axis_w)
CONNFRAME(33,tablenum, Viraxis_x, Viraxis_y,Viraxis_rz)
WAIT LOADED
建立成功后,关节轴Axis_u、Axis_v、Axis_w中MTYPE将显示为33,IDLE显示为0。
此时只能操作虚拟轴Viraxis_x、Viraxis_y、Viraxis_rz在直角坐标系中运动,关节轴Axis_u、Axis_v、Axis_w会自动计算在关节坐标系中如何联合运动。
5)UVW平台运动控制算法示例程序如下
global lu,lv,lw,angleonecircle,diru,dirv,dirw
Lu = 20 '零点到U轴的垂直距离
Lv = 10 '零点到V轴的垂直距离
Lw = 10 '零点到W轴的垂直距离
angleonecircle = 360000 '虚拟旋转轴一圈脉冲数
diru = 0 'U轴的方向,0 U轴与虚拟X正向一致,1反向
dirv = 0 'V轴的方向,0 V轴与虚拟Y正向一致,1反向
dirw = 0 'W轴的方向,0 W轴与虚拟Y正向一致,1反向
'''''关节轴设置
BASE(0,1,2) '选择关节轴号
atype=1,1,1,1 '轴类型设为脉冲轴
UNITS=10000/1,10000/1,10000/1 '把U,V,W轴设成1mm的脉冲数
DPOS=0,0,0 '设置关节轴的位置,此处要根据实际情况来修改
speed=100,100,100 '速度参数设置
accel=1000,1000,1000
decel=1000,1000,1000
CLUTCH_RATE=10000,10000,10000 '使用关节轴的速度和加速度限制
'''''虚拟轴设置
BASE(6,7,8)
ATYPE=0,0,0 '设置为虚拟轴
'根据手册说明填写参数
TABLE(0,Lu,Lv,Lw,angleonecircle,diru,dirv,dirw)
'运动精度,要提前设置,中途不能变化
UNITS=1000,1000 ,angleonecircle/360
speed=200,200,200 '速度参数设置
accel=1000,1000,1000
decel=1000,1000,1000
'''''建立机械手连接
while 1
if modbus_bit(0)=ON then '输入0上升沿触发
modbus_bit(0) = 0
BASE(0,1,2) '选择关节轴UVW...
CONNFRAME(33,0,6,7,8) '第6/7/8轴作为虚拟的XY轴,启动逆解连接。
WAIT LOADED '等待运动加载,此时会自动调整虚拟轴的位置。
?"逆解模式"
while 1
base(6,7,8)
moveabs(5,5,5)
wait idle(6)
delay(100)
wend
endif
Wend
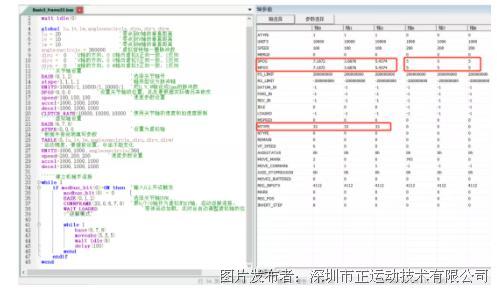
程序执行后,虚拟轴(轴6,轴7,轴8)分别运动到5,5,5的位置,轴0,轴1,轴2分别运动到7.1872,3.6876,5.4374的位置,同时关节轴(轴0,轴1,轴2)的MTYPE均为33。
正运动技术UVW对位平台的算法实现
UVW平台一种可以实现以平面上任意一点为中心,进行旋转运动的装置,并可沿着任意的方向平移。UVW平台和视觉系统对接在一起,可以很快完成高精度的纠偏工作,重复定位精度高达±1μm。
正运动技术ZMC406运动控制器可根据系统需求搭配不同硬件平台,支持PC平台的各种操作系统(windows、Linux、iMac)以及各种上位机软件(C、C++、C#、Delphi、VB、.Net、LabVIEW、Python、MATLAB,等等)的应用。

正运动控制器/控制卡集成了UVW运动平台的运动控制算法配合视觉系统,能够满足UVW平台定位的对位应用场景,支持市面上主要品牌的UVW平台。正运动技术的参考方案中配置了运动控制测试文件和程序,提供例程源代码,特殊结构的机械手算法需求也可以定制开发。
本方案适用于需要高精度UVW对位平台的自动化设备,如印刷(丝印机、曝光机、贴标机),PCB相关(FPC 补强机机、PCB贴合机),3C电子(辅料贴合机、贴膜机、打标机)等行业。
本文由正运动小助手原创,欢迎大家转载,共同学习,一起提高中国智能制造水平。文章版权归正运动技术所有,如有转载请注明文章来源。





楼主最近还看过
- 开关磁阻电机和反应式步进电...
 [5881]
[5881] - 伺服培训内部资料放出[10511]
- 伺服回原点[10613]
- 如何用PLC+2台变频器+2个编码...[8526]
- 伺服电机急停方法[5980]
- 数控中的1丝\1条是多少um啊...[12625]
- 关于伺服电机的油封问题。[5431]
- 资料分享:伺服系统基础知识,...[10400]
- 谁知道音圈电机???[13263]
- 松下A5伺服如何做转矩控制?[6192]

官方公众号

智造工程师
-

 客服
客服

-

 小程序
小程序

-

 公众号
公众号











 工控网智造工程师好文精选
工控网智造工程师好文精选
