求助ABB六轴做工具坐标程序。 点击:1241 | 回复:9






楼主最近还看过
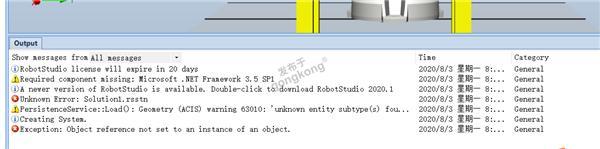 创建系统时出现这个错误,不知道怎么解决了?
创建系统时出现这个错误,不知道怎么解决了?热门招聘
相关主题
- ABB机器人安装流程及拆包流程...
 [1199]
[1199] - 机器人设计方面的知识或网站...[1012]
- EPSON四轴机械手不动作[830]
- 库卡机器人POS_ACT.X[1199]
- EPSON机器人视频教程[838]
- 机器人长期断电,你怎么处理的...[1401]
- 大电机维修,实在好玩好玩,比...[897]
- ABB官方焊接、码垛例子程序(含...[3302]
- 川崎kroset软件下载谁有[1746]
- HYUNDAI 北京现代重工业的机...[2311]

官方公众号

智造工程师
-

 客服
客服

-

 小程序
小程序

-

 公众号
公众号











 工控网智造工程师好文精选
工控网智造工程师好文精选
