机器人底盘平台 点击:240 | 回复:0

发表于:2019-10-24 09:42:59
楼主
ROSYZ-01B ROS机器人 底盘 平台
ROSYZ-01B机器人底盘平台采用双轮差速运动结构加装减震万向轮构成, 适合于平坦地面的室内和室外多种不同的应用场所直接使用. ROSYZ-01B可以选配酷睿I3或I5处理器的工控机, 已经预装好了UBUNTU16.04和ROS KINETIC系统软件, 选配激光雷达的版本, 可以完全独立完成构建地图/导航行走/运送/监控等诸多工作, 用户即可用于技术研究, 也可直接用于产品开发. YZ-01B平台的最大负荷可以达50KG,最高行走速度可达1米每秒。
ROSYZ-01B内置的DCDC电源转换模块可以提供5V, 12V,19V和24V四种不同电压,基本上可以解决机器人需要搭载的绝大多数电脑主板和各种传感器的供电问题。ROSYZ-01B也提供开源的基本ROS应用示例和基础的运动驱动节点程序,让开发者能非常容易上手使用。ROSYZ-01B机器人底盘平台适合于ROS机器人爱好者、大专院校学生和中小微企业研发工程师使用
| 运动底盘尺寸 | 45X40X37 CM | 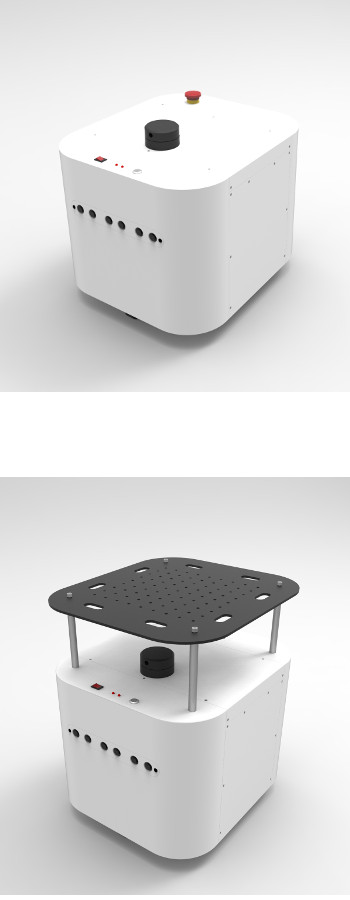 |
| 运动底盘重量 | 22KG(不含电池的裸机重量) | |
| 驱动方式 | 双路差速驱动 | |
| 电池配置 | 24V10AH、20AH(选配) | |
| 电机规格 | 24V高效能轮毂电机 | |
| 配置传感器 | 内置超声传感器; EAI激光雷达选配 | |
| 内置电脑 | 选配酷睿i5处理器工控机 | |
| 电脑通信接口 | USB X4 / VGA / 以太网口 | |
| 电源输出接口 | 5V2A、12V2A、19V4A 24V2A | |
| 运动速度范围 | 0.1-0.9米每秒 | |
| 最大承载重量 | 50KG | |
| 标配充电器 | 29.4V3A智能充电器 | |
| 自动充电桩 | 选配. 充电引导为激光+红外方式 | |
| 底盘控制板MCU | STM32F10X ARM主芯片 | |
| 紧急停车方式 | 拍按红色急停开关 | |
| 上层平台高度 | 30CM | |
| 软件硬件支持 | 可提供软件示例代码、电路原理图 |





热门招聘
相关主题
- 伺服刚度
 [6807]
[6807] - 各位师傅。请问一下:三相用的...[8501]
- 什么是绝对值编码器的“绝对”...[13630]
- 原点回归指令[7029]
- 国产直线电机位移平台,定位精...[16856]
- 求助:能否用PC代替PLC控制伺...[5515]
- 用脉冲方式控制伺服电机的讨...[14119]
- 请教采用通讯方式与采用运动...[5965]
- 是伺服电机过载吗?[7873]
- 关于松下伺服报警ERR.11和ER...[8688]

官方公众号

智造工程师
-

 客服
客服

-

 小程序
小程序

-

 公众号
公众号











 工控网智造工程师好文精选
工控网智造工程师好文精选
