寻求绞车控制算法帮助 点击:1375 | 回复:16








楼主最近还看过



大家好,谢谢各位的回复,我们选的编码器是485通讯的绝对值编码器,这个编码器的好处是掉电后,编码器数值不复位,可以继续之前的操作。我们用这个编码器计算绞车放绳子的长度,同时也用它来计算放绳速度。所以用485通讯。
至于用变频器或控制器等方式我们测试过,由于电源或功率问题,达不到我们的要求,我们就采用了目前的用刹车控制下放的方式。
但由于下放时电机是不工作状态,如果不控制,就是自由落体状态。所以为了达到较好的下放效果,下放速度的计算需要快、准,但我们自己没做到,快了就不准,就更没法控制刹车力度。
以上是我们目前状态,欢迎各位提出好的建议。
请各位看看怎么能帮我们解决,给出可用的算法,谢谢。


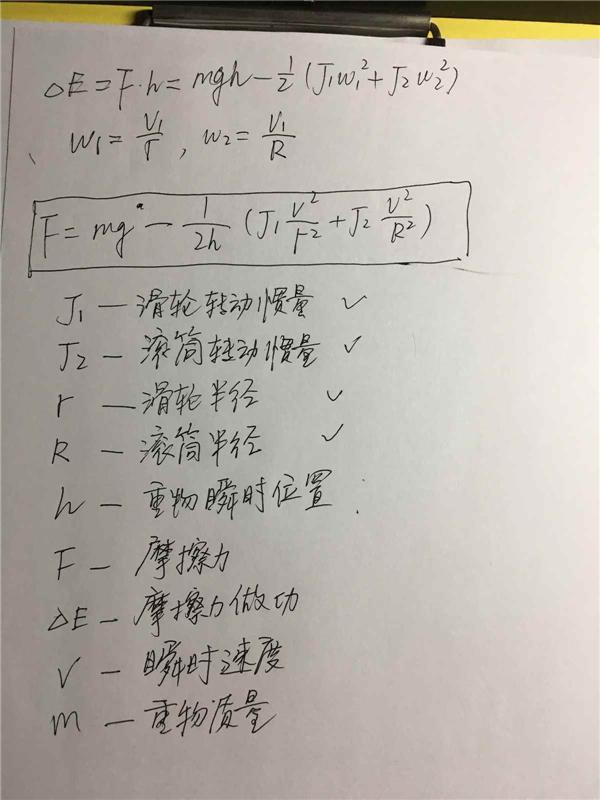
楼主的意思看明白了 用485通讯虽然速度达不到 但这个工艺对速度要求不是太高 所以485通讯没啥问题 技术上方案是可行的 关键问题应该是出现在算法上 感觉你把问题复杂化了 你的目的是平稳下降 而不是要求立即达到设定速度 简化下工艺问题就简单了(这里刹车的理解对不对先确认一下 刹车在最高点是不是抱死的 然后慢慢松开 下放?) 过程为(1)人为设置梯度给定的方式给出电压输出控制刹车,让滚筒加速下降,例如刹车出力从100%,每间隔3秒下降5%,这里的间隔时间和下降幅度自己调试设定,比如考虑重物重量乘以系数或不考虑也无所谓 (2)投用PID调节,但这个时候的PID要做处理,故意放大比例,减少积分,作用是稳定下降速度(3)当速度小于设定速度且误差在10%的范围内投用PID调节(4)当下降到距离目的地一定距离时启用定位PI调节。

各位好,感谢各位的回复,你们的回复给了我们很大启发。
但我们领导认为大家的回复还不能完全解决我们的问题,认为是我没将事情说清楚,所以领导将需求更改成现在的需求,希望大家能更加清晰理解我们的需求。
现在问题还没有结束,等结束时我再给大家分。
我们领导的要求是找一个控制算法,大家说的PID调节等算法可能可以,但我们是用主板自己写的嵌入式程序,不是用的PLC或其它控制器,所以算法得自己写。我们自己经验不足,寻求帮助。
希望大家能提供相应的算法,无论什么算法,能解决我们的问题就好。
如果谁有算法,我们可以给予一定的报酬,谢谢。
注意:我们的传感器是位置传感器,不是速度传感器,速度需要自己计算。我们自己计算频率快时,速度计算不稳。
重物最大重量应是260公斤。
谢谢大家
这里有个研究的文章https://wenku.baidu.com/view/ecc65cfad15abe23482f4d6d.html?from=search你可以借鉴一下,想要匀速运动并且速度可控,前提是加速度要消除掉,消除的办法是用制动器,制动器上有个最大制动扭力,考虑到力与加速度的关系,消除掉加速度即可,理论上是行得通,现实中要考虑的因素很多,实时的速度你可以100MS取一次,进行与设定值比较,当等于大于时开始控制,若控制不理想,你可以控制提前或者控制制动力输出大一点(建议提前控制)PID来控制的话,效果就比较明显的了。
个人意见仅供参考
- 请问:松下伺服驱动器的差分脉...
 [12852]
[12852] - 急求松下MBDHT2510E伺服驱动...[7874]
- 伺服电机后带减速机和不带减...[5512]
- 三菱伺服中位置环增益和速度...[9205]
- 关于解决伺服原点及脉冲丢失...[7481]
- 速度环位置环之间的关系[5714]
- 有谁能告诉一下力矩电机的工...[18268]
- 请教关于伺服电机转矩控制模...[7628]
- 有关伺服零点开关的问题[19390]
- 伺服电机主轴很紧,用手转不动...[13958]

官方公众号

智造工程师
-

 客服
客服

-

 小程序
小程序

-

 公众号
公众号











 工控网智造工程师好文精选
工控网智造工程师好文精选
