从控制原理看伺服控制中各物理量与数字量间的关系 点击:1312 | 回复:20

从控制原理看伺服控制中各物理量与数字量间的关系
刘志斌
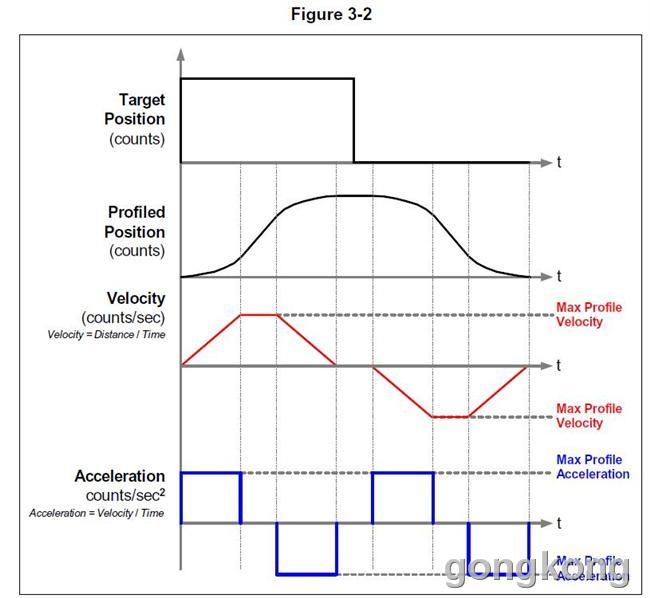
1、我来给大家解析这张图,通过解析我们会清楚的看到,伺服的工作原理、结构组成以及各物理量与数字量间的关系;
2、我先讨论,后总结成文;

1、目标位移指令脉冲数是根据运动工件实际目标位移和脉冲当量计算所得:
运动工件目标位移÷脉冲当量=目标位移指令脉冲数
2、伺服周指令脉冲数=螺距/减速比÷脉冲当量
3、指令脉冲额定频率为位置环计数上限频率,指令脉冲额定频率=伺服周指令脉冲数×电机最大速度,当电机速度超过电机最大速度,位置环脉冲会丢失而位置失控;
4、伺服周指令脉冲数=编码器周反馈脉冲数/电子齿轮比
5、这条指令脉冲频率曲线图是个设定曲线图,实际运行中没有指令脉冲以及它的发送问题;
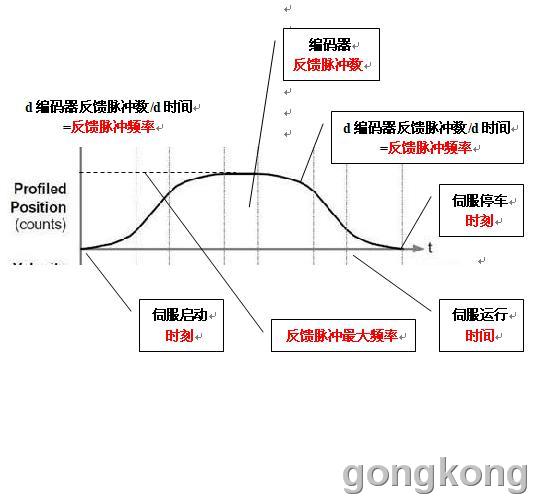
1、这个图是伺服运动期间编码器反馈脉冲频率曲线,是可以用示波器观察到的曲线;
2、你完全可以看成伺服实际运行过程的速度曲线图,因为
编码器反馈脉冲频率=编码器周反馈脉冲数×伺服电机速度(r/s)
3、编码器反馈脉冲数/电子齿轮比=目标位移指令脉冲数,是位置闭环实现位移精确控制的核心原理,如果
编码器反馈脉冲数/电子齿轮比≠目标位移指令脉冲数
就说明控制有误差,控制绝对误差
控制绝对误差=(编码器反馈脉冲数/电子齿轮比 - 目标位移指令脉冲数)×脉冲当量;
4、编码器反馈脉冲最大频率,对应伺服运行最大速度,伺服最大运行速度要小于1图伺服最大速度,或者说 编码器反馈脉冲最大频率/电子齿轮比≤指令脉冲额定频率,否则会出现丢失脉冲控制失败的问题;
5、从曲线可以看出,伺服控制运行的要点,还有起步后有加速、停车前要减速,即编码器反馈脉冲曲线是一个梯形波,特别是停车前减速很重要,只有速度减下来了,才能实现准停;
6、伺服实际运行速度要小于1图的最大速度,伺服的运行速度可以在速度环通过给定编码器反馈脉冲频率(或者指令脉冲频率=反馈脉冲频率/电子齿轮比)给定;
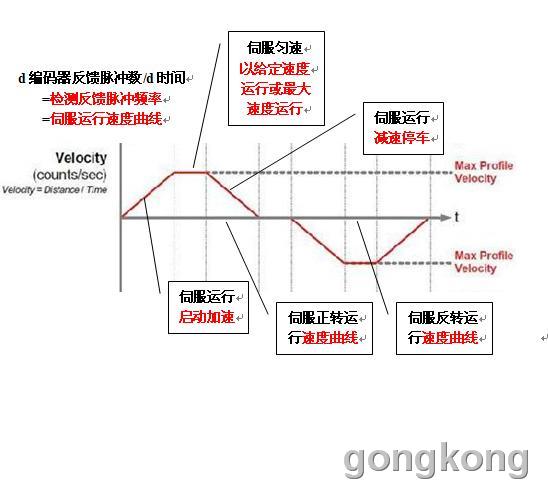
1、这是伺服速度环输出速度曲线图;
2、速度环给定编码器反馈脉冲频率(或给定指令脉冲频率=编码器反馈脉冲频率/电子齿轮比)就是给定伺服速度
编码器反馈脉冲频率=编码器周反馈脉冲数×电机速度(r/s)
3、速度环靠编码器检测反馈脉冲频率,即认为是速度的反馈;
4、速度环控制的是交流电机的频率、电压,就控制量交流电机的速度;
5、速度环的工作原理就是变频器工作原理,加、减速设置在速度环上,既可以是频率电压的加、减,也可以是反馈脉冲频率的加、减;

1、此图是伺服编码器反馈脉冲频率的变化率曲线;
2、也就是伺服运行加速加速度和减速加速度曲线;
3、其值为加、减速曲线的斜率,也是编码器反馈脉冲频率曲线梯形波腰的斜率;
4、此图也可以看做电流环的电流波形图,加、减速伺服电流环电流给定,恒电流恒转矩调速过程;
5、电流环可给定电流或给定编码器反馈脉冲频率的变化率,检测反馈运行电流或检测反馈编码器反馈脉冲频率变化率!







引用 笨鳥慢飛 的回复内容:
……PLC不是運動控制計數器只是PLC一個擴充的模組(正確叫高速技術器) 你可以把他想成是個高速的PLC 掃描週期在2ms 重要的他不是位置環 他只做高速中斷的功能(計數器一般多與光學尺搭配 他多數顯示位置 高階具有倍頻的功能 )
1、“PLC……重要的他不是位置環 ,他只做高速中斷的功能”,不同意笨鸟的说法,看来笨鸟对伺服并不真正了解;
2、PLC的重要功能就是位置环计数器,他要根据 “指令脉冲数=编码器反馈脉冲数/电子齿轮比”输出停车指令;
3、指令脉冲频率曲线是位置环的给定曲线,编码器的反馈脉冲曲线是位置环的实时反馈曲线,也是位置环的输出位置曲线;
- 求助伺服电机抗干扰
 [12633]
[12633] - 双电机电气消隙的工作原理[原...[5748]
- 求助“分度盘工作原理”?[6127]
- PLC控制与运动控制卡的比较[7922]
- 关于伺服电机抖动问题[11023]
- 求助:如何只改驱动器等外围接...[5926]
- 伺服电机的扭矩能到多大[16373]
- 伺服电机不能回原点[13855]
- 如何实现电子凸轮[18368]
- 浅谈直接PWM控制方式、模拟量...[11190]

官方公众号

智造工程师
-

 客服
客服

-

 小程序
小程序

-

 公众号
公众号











 工控网智造工程师好文精选
工控网智造工程师好文精选
