矢量控制:真实 or 谎言 ? 点击:29040 | 回复:415

孔子曰:“朝闻道,夕死可矣”。
变频器的技术发展很快无数,从最初的V/F控制,到后来的闭环矢量控制,再到开环矢量控制,经历了一个较长的过程。其中开环矢量控制在1980年代由日本安川公司率先得以实现,是一个非常成熟的控制体系。本人做过实验,开环矢量控制,以安川616G5为例,在1Hz的运行频率下,也能达到150%的额定转矩。
我国在自动控制领域与日本或其它发达国家的已经存在巨大差距,如果到现在,我们还停留在讨论“矢量是否是个骗局”这样的一个水平上,无疑将对初学者学习变频器知识会有很大的伤害。所以发表此篇文章,力求深入浅出,方便大家理解矢量的基本含义。如有不对的地方,敬请朋友们提出指正的意见。
“矢”者,箭也。我们知道,要让弓箭发挥作用,力度和方向都要控制好。所谓“矢量”,指的是既有大小又有方向的量。那么,“矢量控制”,也就是对方向和力度同时进行控制。
如何理解矢量控制,我们需要先搞清电机的力的来源。我们一般所指的电机力,都来源于一个基本的原理,就是磁铁同极性的排斥力,或者是异极性的吸引力。在此,可以先把电机的运动简化为2块磁铁之间试图对齐,而我们努力不让它们对齐的结果。
从简单的开始,我们先来看看直流电机。对于直流电机,天生就实现了矢量控制。
1.先看看两块磁铁分别在哪里?定子是一块空间位置固定不变的磁铁(在此,我们只讨论最为常见的他励方式),转子是另一块磁铁。
2.有人会问,一块固定的磁铁,一块旋转的磁铁,磁力线还怎么对齐啊?请看下一条。
3.转子通电即产生磁场,形成另一块磁铁。这个磁铁与定子磁铁的夹角恰好为90度。
4.转子受到磁力的影响产生转动,会偏过一个很小角度,然而此时通过换向器和电刷的配合,转子磁场很快又调整回来了。也就是说,转子虽然在动,转子所形成的的磁场基本没有动。
5.这样,方向的控制,通过电刷、换向器、转子绕组的配合得以实现。
6.此时,只要控制好转子的电流,就控制了力的大小。
接下来,我们再来看看交流电机的情况。
1. 定子通过的是三相交流电,产生的是一个旋转磁场。因此,可以认为定子磁铁是不断旋转的。
2. 要实现矢量控制,首先必须让转子的磁铁也同步地转起来。
3. 电机的电磁转矩与定子磁场强度、转子磁场强度、2块磁铁之间的夹角的正弦成正比。关于这一点不难理解,两块磁铁对齐的时候(0度,sin0°=0;),不存在电磁转矩;两块磁铁相差90度的时候(sin90°=1;),电磁转矩达到顶峰;
4. 接下来控制的目标就是:
1)稳定其中的一个旋转磁场的强度(恒定磁场);
2)控制磁铁之间角度为90度(磁场定向FOC);
3)控制另一个磁场(受控磁场)的强度以达到控制电磁转矩大小(力矩控制)。
5. 关于坐标变换的物理意义(以同步电机为例):
1)在电机不失步的情况下,可以认为两个磁极之间相对静止,最多在夹角0~90度之间移动。
2)既然交流电产生的是一个旋转磁场,那么自然可以把它想像成一个直流电产生的恒磁场,只不过这个恒磁场处于旋转当中。
3)如果恒磁场对应的直流电流产生的磁场强度,与对应交流电产生的磁场强度相等,就可以认为两者等同。
4)坐标变换基于以上认知,首先认为观察者站在恒定磁场上并随之运转,观察被控磁场的直流电线圈电流及两个磁场之间的夹角。
5)实际的坐标变化计算出的结果有两个,直轴电流Id和交轴电流Iq。通过Id和Iq可以算出两者的矢量和(总电流),及两个磁场之间的夹角。
6)直轴电流Id是不出力的,交轴电流Iq是产生电磁转矩关键因素。
6. 对于交流同步隐极电动机(常见于交流伺服电机):
1)其转子磁场是恒定的(由磁钢片决定)。
2)转子的当前磁极位置用旋转编码器实时检测。
3)定子磁极(旋转磁场)的位置从A相轴线为起点,由变频器所发的正弦波来决定。
4)实际上先有定子磁场的旋转,然后才有转子磁场试图与之对齐而产生的跟随。
5)计算出转子磁场与A相轴线之间的偏差角度。
6)通过霍尔元件检测三相定子电流,以转子磁场与A相轴线之间的偏差角度作为算子(相当于观察者与转子磁场同步旋转),通过坐标变换分解出定子旋转磁场中与转子磁极对齐的分量(直轴电流Id),产生转矩的分量(交轴电流Iq)。
7)定子电流所产生旋转磁场与观察者基本同步,最多在夹角0~90度之间移动。移动量是多少,会体现在直轴电流Id、交轴电流Iq的数值对比上。
8)驱动器通过前面的速度环的输出产生电流环的给定,通过第6)条引入电流环的反馈Iq,通过PI控制产生Iq输出。
9)设定Id=0。这一点不难理解,使两个磁极对齐的电流我们是不需要的。通过这一点,我们实现了磁场定向FOC(控制磁铁之间角度为90度)。
10)计算出了Iq, Id=0。引入偏差角度算子通过坐标反变换变换产生了三相电流的输出。
11)当Iq>0, 定子旋转磁场对转子磁场的超前90度,电磁转矩依靠两个磁场之间异性相吸的原理来产生,这时候电磁转矩起到加速的作用。
12)当Iq<0, 定子旋转磁场对转子磁场的仍然超前90度,但是定子磁场的N、S极调换了一下,电磁转矩依靠两个磁场之间同性相排斥的原理来产生,这时候电磁转矩起到减速制动的作用。
13)从本质上讲,我们是依靠控制定子旋转磁场对转子磁场的夹角及该磁场的强度来实现矢量控制的。
7. 对于交流感应电动机(即异步电机):
1)定子通入三相交流电,产生定子旋转磁场,旋转磁场以定子A相轴线为起点出发,并与定子电流相位对齐。
2)定子旋转磁场切割转子绕组,产生三相感应电势e=dλ/dt,λ为穿过转子绕组的磁链。e产生转子电流,然后产生另一个旋转磁场-----转子旋转磁场。如果λ随空间(或时间)正弦变化,则e所产生的转子旋转磁场滞后穿越转子的旋转磁链90度。
3)转子旋转磁场的旋转速度叠加在旋转的转子上。事实上,这两个磁场之间的旋转是同步的。
4)与同步电机不同,感应电机的两个磁场之间不可能发生失步。因为转子速度一旦慢了,定子旋转磁场切割转子的速度就会加快,转子三相感应电势产生转子电流进而产生转子旋转磁场速度就必然加快。导致的结果仍然是两者同步。
5)感应电机的电磁转矩便由这两个磁场之间的试图对齐的力产生。
6)转子旋转磁场与转子电流对齐。
7)如果不考虑转子漏感的影响,转子为纯阻性负载,转子感应电势e与转子电流同相位。此时,这定子旋转磁场与转子旋转磁场之间的角度相差90度。
8)实际上,转子有漏感,且转差率越大,漏感越大,导致转子电流滞后转子电势一个角度,也就是说转子旋转磁场要比感应电势e滞后一个角度。
9)所以,受转子漏感的影响,我们无法保证定子旋转磁场和转子旋转磁场相差90度,它们之间相差的角度大于90度而小于180度。那么,我们就必须控制控制定子旋转磁场中与转子旋转磁场正交的部分,也就是穿过转子绕组的净磁链。
10)与同步电机的第1个区别在于,同步电机的转子磁场自然产生,因此定子上无需直轴电流来产生磁场(Id=0),只需控制交轴电流Iq。而感应电机的定子电流既需要直轴电流来产生定子旋转磁场,又需要交轴电流来产生转子旋转磁场。
11)与同步电机的第2个区别在于,感应电机矢量控制体现在保持定子磁场穿越转子绕组的部分强度恒定,控制转子电流自身产生的旋转磁场的大小。
12)转子起始磁极位置认为是0。在运转的过程中通过旋转编码器对其不断进行检测。为什么可以认为起始磁极位置=0,因为这一误差会随时间衰减到0。
13)定子磁极(定子旋转磁场)的位置从A相轴线为起点,由变频器所发的正弦波来决定。
14)计算出转子旋转磁极与A相轴线之间的偏差角度。
15)通过霍尔元件检测三相定子电流,以转子旋转磁场与A相轴线之间的偏差角度作为算子,通过坐标变换分解出其中产生与转子磁极对齐的分量(直轴电流Id),产生转矩的分量(交轴电流Iq)。
16)保持Id为恒定值,即保证穿过转子绕组的净磁链恒定。
17)控制与Id相差90度的Iq大小,也就控制了转子旋转磁场的大小。
2008.12.22 首次发表
2008.12.26日更正部分错误。
2013.10.02 加入直流电机的铺垫,以利于理解。






引用 煙雨朦朦 的回复内容:
……電樞磁勢總與磁場垂直,產生轉矩最有效……
1、直流电机的电枢电流的磁场,是交轴去磁磁场,它使得气隙磁场发生畸变:
1)方向改变;
2)产生转矩的有效主磁通Φ减小;
3)实际情况是,直流发电机会因电枢反应端电压下降,直流电动机会因电枢反应转矩减小;
4)恰恰爲了克服电枢磁场的电枢反应,在定子设置换向极抵消电枢磁场的存在和作用;
2、说“電樞磁勢總與磁場垂直產生轉矩最有效”是个无知的说法!
3、应该是电枢载流导体与主极磁场垂直产生转矩最有效!
4、电枢导体受到的电磁力矩是定子主极磁场Φ产生的,当电流方向与主极磁场方向垂直时,电磁力最大;
5、电枢导体在电枢电流自己的电枢磁场中,没有电磁力;
6、而电枢电流的磁场,恰恰减弱了产生转矩的有效主磁通Φ,直流电机中的换向极就是来克服消除电枢磁场的!
7、楼主的错误,也是把电机的电磁力矩,看成两个磁极间的相互作用,这是一个最大的错误,蒙蔽了不少人!
8、从以上分析的结果看出,所谓“矢量控制”的“借口”本身就不存在,就是无知的胡说!
回复本条
-

為了講清楚矢量控制的概念,我們還需要另外幾個數學概念。前面我們講過:
平面直角坐標系的點(x,y),復數x+y*i,矢量OP,實際都是表示復平面上同一個點P,實際我們還可以用(r,alpha)表示點P,其中r為矢量OP的長度,alpha是矢量OP與原始矢量方向的夾角,一下用a表示alpha。以上表示方法叫極坐標,
矢量OP=(r.a)=r*exp(j*a)=r*cos(a)+j*sin(a)=x+j*y=(x,y)
exp( )表示指數函數。
為了表示方便,我們用de表示degree角度。以下幾個三角函數值應該記住:
sin(0de)=0,cos(0de)=1;sin(60de)=r(3)/2,con(60de)=1/2;sin(120de)=r(3)/2,cos(120de)=-1/2;
sin(240de)=-r(3)/2.cos(240de)=-1/2;
其中r(3)表示3的算數平方根約等於1.732...
回复本条
-
好了,現在我們可以討論矢量控制的基本原理了
首先我們可以定義一個空間矢量i,它由異步電動機三相定子電流(iA,iB,ic)的和構成:
i=iA+iB+iC
我們說理論上它也一樣可以表示為兩個互相垂直的矢量的和假設這兩個垂直(正交)的矢量為iK,iL
於是有:
i=iK+iL
我們知道這完全沒有什麼文體就象6這個數字我可以表示為1+2+3也可以表示為3+3。問題在於他們同時在一個復平面上,又表示同一個矢量那麼三相電流矢量iA,iB,iC和正交矢量iK,iL一定有某種關系。有意思的是,對於任一iA,iB,iC數組有唯一的一組iK,iL與其對應。
回复本条
-
前面我們講了,任一矢量也可以表示為復數。
由於iA,iB,iC三個矢量在任一時刻在復平面上夾角一次差120度,使iA與復平面x軸正方向一致,矢量iA,iB.iC可以用復數表示:
iA=iA*exp(j*0de),iB=iB*exp(j*120de),iC=iC*exp(j*240)注意黑體表示矢量!
iA=iA*exp(j*0de)=iA*(cos(0de)+j*sin(0de))=iA*(1+0)=iA;
iB=iB*exp(j*120de)=iB*(cos(120de)+j*sin(120de))=iB*(-1/2+j*r(3)/2)
iC=iC*exp(j*240de)=iC*(cos(240de)+j*sin(240de))=iC*(-1/2-j*r(3)/2)
i=iA+iB+iC=(iA-1/2*iB-1/2*iC)+j*(r(3)/2*iB-r(3)/2*iC) (式1)
又因為
i=iK+iL=iK+j*iL (式2)
由式1和式2實部和虛部比較
iK=iA-1/2*iB-1/2*iC
iL=r(3)/2*iB-r(3)*iC
由此可知三相交變電流可以轉換為兩相正交的電流!一個不比另一個具有更多的信息,水雖然看起來不同。那麼就可以用控制正交的電流來取代控制三相電流,這有什麼好處呢?
回复本条
-
可能有會感到困惑,有人覺得不解。一個數學變換能說明什麼?但是那些深知數學變換的科學家可不這麼想!舉例來說洛倫茲變換,先於愛因思坦的狹義相對論。黎曼幾何又先於廣義相對論!
1971年,德國人F.Blaschke想到,這樣吧既然三相異步在空間上產生的是旋轉磁場,而電流矢量的三相矢量和的形式可以表示為兩相正交矢量和的形式,那麼叫兩相正交矢量旋轉起來就好了。我們知道異步電動機定子的三相繞組在空間上是固定的,其變換而來的iK,iL的坐標稱為靜止坐標系,我們用相對於靜止坐標系旋轉坐標系的電流空間矢量的分量表示為iM,iT,選擇OM方向與磁場的勵磁方向一致。那麼交流的旋轉磁場,就轉換為兩相正交旋轉磁場,因為勵磁電流iM與轉矩電流iT垂直,所以可以獨立調節!
所以矢量控制的關鍵在於
(1)如何識別旋轉磁場的勵磁分量;
(2)從靜止坐標系到旋轉坐標系變換時必須知道旋轉坐標和靜止坐標的夾角。
回复本条
-

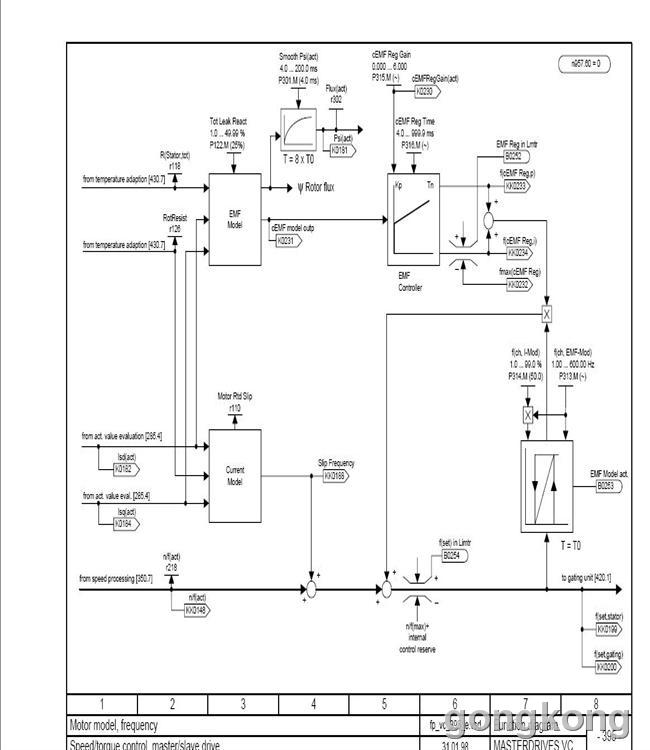
就我手頭的資料我可以確定,西門子6se70系列矢量控制變頻器使用的是”異步電動機二相以同步轉速w1旋轉的d,q坐標的數學模型“。所以我們也隻寫出這個模型的電壓矩陣方程和電磁轉矩方程。
(1)電壓矩陣方程(線性方程組)
u1d=(r1+P*L1)*i1d-w1*L1*i1q+P*M*i2d-w1*M*i2q
u1q=w1*L1*i1d+(r1+P*L1)*i1q+w1*M*i2d+P*M*i2q
u2d=P*M*i1d-ws*M*i1q+(r2+P*L2)*i2d-ws*L2*i2q
u2q=ws*M*i1d+P*M*i1q+ws*L2*i2d+(r2+P*L2)*i2q
式中ws轉差角頻率 ws=s*w1=w1-w
(2)電磁轉矩方程
T=(3/2)*p*M(i1q*i2d-i1d*i2q)
我們將d軸與轉子磁鏈方向一致,也就是轉子磁場定向。加上異步電動機轉子是短路的這個條件,上述模型可以簡化。
可以得到轉子磁鏈C2公式:
C2=i1d*M/(1+T2*P),T2=L2/r2為異步電動機轉子時間常數。
轉差角頻率ws=((1+T2*P)/T2)*(i1q/i1d),ws=w1-w,對w1積分可以得到旋轉磁場坐標和靜止坐標系的夾角。
從上面看,轉子磁鏈完全可以由i1d控制,而力矩則由i1q調節。
回复本条
-
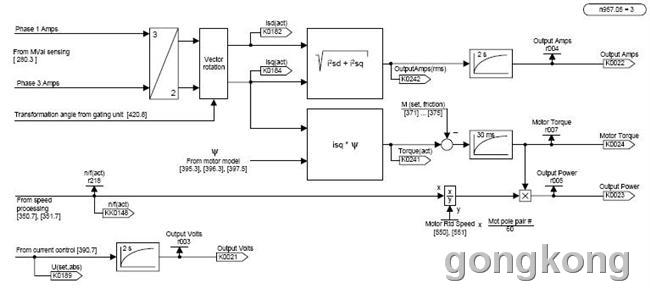
這張圖很有意思。
(1)首先我們可以看到,由1相和3相的電流取樣信號直接由3/2相轉換電路和矢量旋轉功能塊變成了我們熟悉的d,q坐標的isd,isq正交電流分量;
(2)isd*isd+isq*isq開方之後濾波(2s)給了變頻器的連接字K0022,並且由r004顯示變頻器的輸出電流(注意不是由測量電路直接顯示的!);
(3)由框圖395或396或397頁電機模型磁鏈數值與isq乘積經過30ms濾波得到電機轉矩連接字K0024,並通過r007顯示電機轉矩。
此外電機輸出功率的計算也很有意思,實際就是下列公司
P=2*pai*f*T隻不過是用百分表示!
這張圖明白無誤的告訴我們,電機轉矩隻與轉子磁鏈和isq電流分量有關,這是矢量控制的一個標志。
還有一點,為什麼3/2轉換電路隻輸入兩相?實際這與基爾霍夫電流定律有關實際對於電機三端網絡,三相電流不是獨立的,因為iA+iB+iC=0,所以隻要兩相取樣就可以了。
回复本条
-
現在我回答最後一個問題,有人講你們聲稱矢量控制存在,連參數都講不出,那怎麼行呢?講得很對。現在我們基本了解了矢量控制的思路,那麼我們講矢量控制最重要的是設置那些與電機模型的有關參數。有人說了,你怎麼知道電機的電阻電感參數。這是另一個問題我們在最後再談。我們來看參數本身。以下均以6SE70為例。
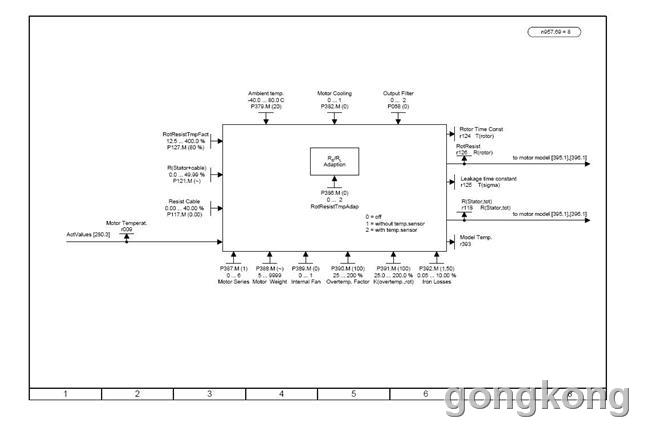
(1)溫度模型
1.輸入電機溫度,由r009單元顯示
2.輸出定子電阻、轉子電阻
3.賦值參數:P117電纜電阻、P121定子和電纜電阻之和、P127、P379環境溫度、P382電機冷卻方式、P068輸出濾波、P387電機系列、P388電機重量、P389內部風扇、P390超溫系數、P391轉子超溫系數、P392鐵損、P386轉子電阻適應調節
回复本条
-
- 为什么变频器容易烧电机
 [8560]
[8560] - 关于变频器故障责任问题[5898]
- 请教:零线和地线共用接在变频...[9573]
- 电动自行车蓄电池在放电的同...[9195]
- 富士变频器报警ER1/ER2/ER3/...[8131]
- 富士变频器没有频率输出[5330]
- 为什么用西门子MM440变频器面...[9213]
- 变频器在工程应用中需要注意...[5769]
- VF控制和矢量控制的一些区别[28474]
- 请问:132KW的电机需要选择多...[6830]

官方公众号

智造工程师
-

 客服
客服

-

 小程序
小程序

-

 公众号
公众号











 工控网智造工程师好文精选
工控网智造工程师好文精选
