交流伺服系统国标 点击:4926 | 回复:34

交流伺服系统通用条件
GB/T 16439—1996
General specification for A.C.servo system
1主题内容与适用范围
本标准规定了交流伺服系统通用的技术要求、试验方法、检验规则、标志、包装、运输和贮存。
本标准适用于模拟和数字化的以速度闭环为主要闭环的交流伺服系统(以下简称伺服系统),也兼顾到带有位置闭环的位置伺服系统,但不包括CNC控制器。
伺服系统由伺服驱动器和伺服电机两个主要部分组成,伺服系统的完整组成应符合专用技术条件的规定。
本标准未列入而伺服系统产品又必须涉及的技术要求应按照有关的电机标准的电子设备标准的规定执行。
2 引用标准
GB 191—90 包装储运图示标志
GB 3797—89 电控设备 第二部分:装有电子器件的电控设备
GB 4942.2—85 低压电器外壳防护等级
GB 5080.1—86 设备可靠性试验总要求
GB 5872—86 控制微电机包装技术条件





楼主最近还看过
3.1交流伺服系统
运动控制系统中以交流伺服电动机作为执行元件的、直接被控量为位移、速度、加速度、力或力矩的反馈控制系统。
3.2 转速变化率
伺服系统在某一给定转速下,负载由空载变化到连续工作区中规定的最大负载,其转速变化的相对值叫做转变化率S。即:
S=(n0-nL)/n0 ×100% ………………………………(1)
式中:n0——空载下的转速;
nL——负载下的转速。
3.3 调速比(调速范围)
伺服系统满足规定的转速变化率和规定的转矩波动(或转速波动)时的最低空载转速nmin和额定转速nN之比叫做调速比D。
D=nmin/nN ………………………………(2)
3.4 稳速误差
伺服系统在额定转速、空载条件下,电源电压变化,或环境温度变化,或电源电压不变、环境温度不变但连续运行若干小时,电机平均转速的变化值与额定转速的百分比分别叫做电压变化的稳速误差、温度变化的稳速误差、时间变化的稳速误差。
3.5 超调量
伺服系统输入阶跃信号,时间响应曲线上超出稳态转速(终值)的最大转速差值(瞬态超调)对稳态转速(终值)的百分比叫做转速上升时的超调量(图1);伺服系统运行在稳态转速,输入信号阶跃至零,时间响应曲线上超出零转速的反向转速的最大转速值(瞬态超调)对稳态转速的百分比叫做转速下降时的超调量。
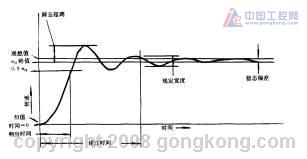
图1 阶跃输入的时间响应曲线
3.6 转矩变化的时间响应
伺服系统正常运行时,对电机突然施加转矩负载或突然卸去转矩负载,电机转速随时间的变化叫做伺服系统对转矩变化的时间响应。(图2)
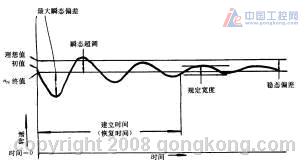
图2 突加负载的时间响应曲线(输入不变)
3.7 阶跃输入的转速响应时间
伺服系统输入由零到对应nN的正阶跃信号,从阶跃信号开始至转速第一次达到0.9nN的时间(图1);伺服系统输入由对应nN到零的负阶跃信号,从阶跃信号开始至转速第一次达到0.1nN的时间。上述正、负阶跃过程中规定的时间称阶跃输入的转速响应时间。
3.6 建立时间
伺服系统输入由零到对应nN的阶跃信号,从输入信号开始至转速达到并不再超出稳态转速(终值)的±5%的范围,所经历的时间叫做阶跃输入的转速建立时间(图1)。不改变伺服系统的输入,对电机突然施加转矩负载或突然卸去转矩负载,从突然加、卸载开始至转速达到并不再超出稳定转速(终值)的±5%的范围所经历的时间叫做转矩变化的转速建立时间(恢复时间)(图2)。
3.9 转速波动
伺服系统稳态运行时,瞬态转速的最大值为n*max,最小值为n*min,则:
转速波动= (n*max-n*nin)/ (n*max+n*nin) ×100%………………………………(3)
3.10 转矩波动
伺服系统稳态运行时,对电机施加恒定的负载,连续测量输出转矩,瞬态转矩的最大值为T*max,最小值为T*min,则:
转矩波动= (T*max-T*nin)/ (T*max+T*nin) ×100%……………………………(4)
3.11 频带宽度
伺服系统输入量为正弦波,随着正弦波信号的频率逐渐升高,对应的输出量的相位滞后逐渐增大同时幅值逐渐减小,相位滞后增大到90°时或者幅值减小至低频段幅值
 时的频率叫做伺服系统的频带宽度。
时的频率叫做伺服系统的频带宽度。 3.12 静态刚度
位置伺服系统处于空载零速工作状态,对电机轴端正转方向或反转方向施加连续转矩TO,测量出转角的偏移量△θ,则:
静态刚度=T0 /△θ ……………………………(5)
本标准规定转角采用分为单位,则静态刚度的单位为N•m/(′)。
3.13 惯量适应范围
伺服系统带有规定范围的惯量负载,在不影响系统的稳定性和调速比的前提下所能带的惯量负载的范围(一般以伺服电机转子惯量的倍数表示)叫做系统的惯量适应范围。
4 技术要求
4.1 电气机械结构
4.1.1伺服系统外壳及结构零部件不允许有明显的凹痕、划伤、裂缝、变形、表面涂镀层不允许出现气泡、龟裂、脱落、锈蚀等缺陷。铭牌和面板上的数字、文字、符号和标志必须清晰端正。
4.1.2 伺服系统的接地设计,应将交流公共零电位和保护接地分开设置。伺服电机和驱动器外壳应设保护接地及标志,伺服系统外壳和其他裸露导体件必须与保护接地端子构成回路,保证有永久良好的导电性,保护接地端子与伺服系统任何裸露导体件和整机外壳之间的电阻不得大于0.1Ω。
4.1.3 伺服系统防止触电的保护应符合GB 3797—89中3.9.1款的要求。
4.1.4 伺服驱动器外壳防护应符合GB 4942.2—85中IP00级的要求。
4.2 气候环境
伺服系统的工作气候环境条件及贮存运输气候环境条件见表1。
表1
项 目 工作气候条件 贮存运输气候条件
环境温度 0~40℃ 40~55℃
相对湿度 40%~80%(不凝露) ≤93%(40℃)
大气压强 86~106kPa 86~106kPa
4.3 电气安全性
4.3.1 绝缘电阻
伺服驱动器中除不允许做高压试验的电路外,检查试验点对保护接地端之间的绝缘电阻应不小于50MΩ。经受恒定湿热试验后绝缘电阻应不小于1 MΩ。
4.3.2 耐电压强度
伺服驱动器中的检查试验点对保护接地端之间应能承受GB 3797—89中3.7.2款表4所规定的介电试验电压(有效值),试验中应无击穿、飞弧和闪络现象。
4.3.3 泄漏电流
当伺服系统接入供电电网后,在正常运行时,驱动器任一电源进线端对保护接地端的泄漏电流值应不大于3.5mA。
4.4 电源适应性
当供电电压在额定电压值的110%和85%及频率在50Hz±1Hz的范围内变化时,伺服系统应能正常运行。
4.5 正反转速差
对于速度闭环的伺服系统,仅改变指令电压的极性,空载条件下,电机在额定转速时的正反转速差应符合专用技术条件的规定。
对于速度闭环的伺服系统,在nN和D•nN时的转速变化率应符合专用技术条件的规定。
4.7 调速比
对于速度闭环的伺服系统,其调速比D应符合专用技术条件的规定,优先选用的D的值为:1∶1000;1∶2000;1∶3000;1∶5000;1∶10000。
4.8 转矩波动
对于速度闭环的伺服系统,转矩波动应符合专用技术条件的规定,伺服系统在最低转速下的转矩波动,推荐按下列值规定:3%;5%;7%;10%;20%。
4.9 转速波动
对于速度闭环的伺服系统,空载条件下额定转速时的转速波动应符合专用技术条件的规定。
4.10 稳速误差
伺服系统在产品允许的工作环境温度条件的最低温度和最高温度,在额定转速下,测出两个状态的平均转速的转速差,计算温度变化的稳速误差;在供电电源电压由额定值的85%变化到110%时,测量出电压变化的稳速误差;在电压不变、正常工作气候条件下伺服系统连续运行8h,测量出时间变化稳速误差;均应符合专用技术条件的规定。
4.11 转矩变化的时间响应
伺服系统稳态运行时,突然施加负载转矩和突然卸去负载转矩,电机转速的最大瞬态偏差和建立时间(恢复时间)应符合专用技术条件的规定。
4.12 转速变化的时间响应
伺服系统空载条件下,输入阶跃信号,转速变化的时间响应过程中响应时间、超调量和建立时间,均应符合专用技术条件的规定。
4.13 频带宽度
伺服系统速度闭环的频带宽度应符合专用技术条件的规定,并应说明是-3dB频带宽度,还是90°相移的频带宽度。
4.14惯量适应范围
伺服系统的惯量适应范围应在专用技术条件中做出规定。
4.15 静态刚度
位置伺服系统的静态刚度应符合专用技术条件的规定。
4.16 效率
伺服系统输入的电功率对输出的机械功率的转换效率应符合专用技术条件的规定。
4.17 工作区
伺服系统的工作区由连续工作区和间断工作区组成,应在专用技术条件中做出规定。
4.18 高温连续运行
伺服系统应能在4.2规定的最高工作环境温度下和4.4规定的条件下连续运行48h。
4.19 噪声
伺服系统的噪声dB(A)限值应符合专用技术条件的规定。
4.20 抗干扰能力
伺服系统应具有抵抗来自供电电网干扰的能力。在5.19试验条件下,应能正常工作。
4.21 冲击、振动
伺服系统中电机承受的冲击振动试验应符合该电机专用技术条件的规定。驱动器应能承受5.20、5.21规定的冲击、振动试验,试验后伺服系统电气性能不受到影响,不应有机械上的损坏、变形和紧固部位的松动现象,通电后应能正常工作。
4.22 短路保护
伺服系统应具有短路保护功能。
4.23 过载保护
伺服系统过载保护功能的电流-时间关系的图或表应在专用技术条件中做出规定。
4.24 可靠性
伺服系统的可靠性指标用平均无故障工作时间(MTBF)衡量,具体数值应在专用技术条件中做出规定,伺服系统的MTBF应不低于8000h。
4.25 伺服系统接口的基本要求
4.25.1 速度闭环的伺服系统的模拟输入信号为-10~+10V直流电压,输入阻抗应不小于10kΩ。
4.25.2 伺服系统应具有下述与数字控制器的基本交换信号:
a. 准备就绪(输出);
b. 允许/封锁工作(输入);
4.26 恒定湿热
伺服系统应能承受温度40℃±2℃相对湿度(93-3+2)%历时48h的恒定湿热试验,试验后伺服系统应能正常运行。
伺服系统试验应包括伺服驱动器和伺服电机及电机所附带的传感器。试验中所必须使用的调压器、信号给定单元或数字控制器及配电电路等不作为受检查的内容。试验前允许对系统参数进行一次调整,全部试验过程中仅允许对每一个可调环节的参数进行一次调整。
高温连续运行、气候环境、冲击振动等项试验中或试验后系统正常运行的检查均在空载条件下进行,检查内容应包括系统的输入信号由对应电机的最低转速到额定转速,系统不应出现故障。
本标准中的各项检查和试验,对于工作气候条件没有特别指出时一般在表2规定的条件下进行。对于一个试验样品作为试验的一部分所进行的一系列检查和试验的过程中,温度和湿度不应该发生大的变化。用示波器测量电压、电流的波形时,其峰峰值不应小于80mm,每25mm上不应大于两个周期。
表2
项 目 试验条件
环境温度 15~35℃
相对湿度 45%~75%
大气压强 86~106kPa
5.1 电气机械结构
用目测法检查伺服系统应符合4.1的要求,保护接地端子与整机外壳之间的电阻用毫欧表测量应符合4.1.2的要求。
5.2 高温连续运行试验
伺服系统置于高温箱(室)内,箱(室)内温度升到40℃,达到热平衡后,电机在额定转速下空载运行,并维持箱(室)内温度不低于40℃,输入电源电压按表3的规定循环,连续运行48h,伺服系统不应出现故障。
表3
输入电源电压 额定值 额定值+10% 额定值 额定值- 15%
时间,h 4 8 4 8
5.3 绝缘电阻检查
5.3.1 绝缘电阻检查的电路连接见图3。
a. 控制电路的各输入输出端子、及其电源端子和公共端应予以短接,也可以将设计规定不允许经受高电压的控制单元、板和元器件脱开。
b. 通过电容耦合的电路之间不做绝缘电阻检查试验,当需要测试电容耦合的电路与内部设备间的绝缘电阻时,则应暂时用短接线将电容耦合的电路短接。
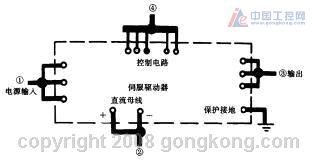
图3 绝缘电阻和耐压强度试验的电路连接
5.3.2 绝缘电阻检查试验
用500V准确度为1.0级的兆欧计连接在伺服驱动器电源输入端(图3中①端)与保护接地端(输入端不接入电网,但驱动器内的电源开关、接触器置于接通位置),在施加测试电压1min后读取绝缘电阻的数值,应符合4.3.1的要求。
将伺服驱动器中的直流母线的正负极短接端(图3中②端),与保护接地端之间用兆欧计施加测试电压1min后,读取绝缘电阻的数值,应符合4.3.1的要求。
试验时,应保证接触点有可靠的接触,测试引线间的绝缘电阻应足够大,以保证读数准确。
5.4 耐电压强度试验
耐电压强度试验的电路连接见图3。试验在伺服驱动器电源输入端(图3中①端,输入端不接入电网,但电源开关、接触器置于接通位置)与保护接地端之间按GB 3797—89中4.4条f、g和h款规定的方法进行。试验结果应符合4.3.2的规定。试验时应将设计规定不经受高压试验的元器件、板脱开(例如电容、压敏电阻等)。
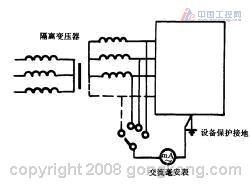
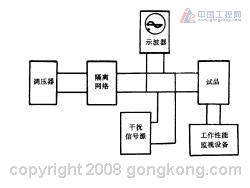
5.5 泄漏电流检查
进行泄漏电流检查时,伺服驱动器的交流电源进线侧应有隔离变压器,使伺服系统在空载状态额定转速下运行,试验结果应符合4.3.3的规定。接线参照图4。
试验时,若不使用隔离变压器,伺服系统要放置在绝缘工作台面上进行。
空载条件下,伺服系统输入额定正反转速指令(改变极性但不改变量值),测量出电机的正反转速nccw 和ncw,按下式计算正反转速差:
正反转速差= ∣nCW-nCCW∣÷ ( nCW+nCCW) ×100%…………………………(6)
正反转速差应符合4.5的规定。
5.7 转速变化率试验
取转速值为nN和D•nN,测量的空载转速记为n0,分别在上述转速下施加连续工作区中规定的最大转矩,测得加载后的转速nL,按式(1)计算转速变化率S,应符合4.6的规定。
5.8 转矩波动
转矩波动在伺服系统的最低转速D•nN状态下测试,对电机施加连续工作区中规定的最大转矩,用测功机测量并记录电机一转中输出转矩,找出最大转矩T*max和最小转矩T*min,按式(4)计算伺服系统的转矩波动,结果应符合4.8的规定。
5.9 转速波动
转速波动在伺服系统的额定转速、空载条件下测试,记录转速波形并找出n*max和n*min,按式(3)计算伺服系统的转速波动,结果应符合4.9规定。
5.10 稳速误差试验
5.10.1 温度变化的稳速误差
伺服系统在空载条件下放置于人工气候箱中,在20℃温度下将电机转速调至nN,然后将温度调至0℃,热平衡后测出电机转速n1,再将温度调至40℃,热平衡后测量电机的转速n2,用下式计算温度变化的稳速误差:
温度变化的稳速误差=∣ni-nN∣ /nN ×100%……………………(7)
式中:i=1,2。
试验结果均应符合4.10的规定。
5.10.2 电压变化的稳速误差
在常温条件下,用调压器调节伺服系统的输入电压,在额定输入电压时将电机转速调至nN并施加额定功率对应的负载转矩,将伺服系统的输入电压调到额定值的110%,记录这时的实际转速n1,然后将输入电压调到额定值的85%,再测出电机转速n2。用下式计算电压变化的稳速误差:
电压变化的稳速误差=∣ni-nN∣ /nN ×100% ……………………………(8)
式中:i=1,2。
试验结果均应符合4.10的规定。
5.10.3 时间变化的稳速误差
伺服系统在正常气候环境条件、额定电压下,空载转速调至nN,维持环境温度变化不超过±2℃,连续运行8h,每间隔0.5h测量一次转速ni,用下式计算时间变化的稳速误差:
时间变化的稳速误差=∣ni-nN∣ /nN ×100% ……………………(9)
式中:i=1,2……16。
取最大偏差值作为试验结果,应符合4.10的规定。
转矩变化的时间响应用与受试伺服系统的电机相同型号、规格、性能的电机对拖法进行,在0.5nN转速下伺服系统由空载突然施加0.5倍连续工作区中规定的最大转矩,稳定后突然卸去该转矩负载,记录转矩变化的时间响应曲线,读出最大的瞬态偏差和建立时间(恢复时间),以读取的最大瞬态偏差的两倍作为瞬态偏差的测试结果,以读取的建立时间(恢复时间)作为建立时间(恢复时间)的测试结果,应符合4.11的规定。允许使用其他的加载设备对受试电机加载,但应能证明加载设备的转动惯量和电气时间常数对测试结果的影响不大于5%,可以直接以读取的数值作为测试结果。
5.12 转速变化的时间响应
伺服系统的电机处于空载零速状态下,输入对应额定转速nN的阶跃信号,记录正阶跃输入的时间响应曲线,读出响应时间、建立时间和瞬态超调并计算出超调量。在稳定的nN转速下,输入信号阶跃到零,记录负阶跃进输入的时间响应曲线,读出响应时间、建立时间和瞬态超调并计算超调量。
改变电机转速方向重复上述试验,测得四组数据,均应符合4.12的规定。
5.13 频带宽度试验
伺服系统输入正弦波转速指令,其幅值为额定转速指令值的0.01倍,频率由1Hz逐渐升高,记录电机对应的转速曲线,随着指令正弦波频率的提高,电机转速的波形曲线对指令正弦波曲线的相位滞后逐渐增大,而幅值逐渐减小。相位滞后增大至90°时的频率作为伺服系统90°相移的频带宽度;幅值减小至
 时的频率作为伺服系统-3dB频带宽度,结果应符合4.13的规定。
时的频率作为伺服系统-3dB频带宽度,结果应符合4.13的规定。 5.14 惯量适应范围试验
在电机轴端带有最大允许的惯量负载条件下,测量系统最低转速时的转速波动,不应超过规定值,然后将转速逐渐升高至额定值,在全部转速范围内不应出现故障。
5.15 静态刚度试验
位置伺服系统处于空载零速状态,用高分辨率高精度轴角传感器检测电机轴角位置,选定这时的电机轴角为参考零位。用滑轮盘挂砝码、测力搬手或杠杆弹簧秤的方法对电机施加正反向转矩,转矩达到连续工作区规定的最大转矩后,测量电机轴角位置对参考零位的偏移量△θ。按式(5)计算伺服系统的静态刚度。试验至少应任取三点,正向和反向共测量六组数据,计算结果均应符合4.15的规定。
5.16 效率
伺服系统的效率包括电机的效率和驱动器的效率。
电机在额定转速、额定输出功率的条件下,测出伺服系统的交流电源输入侧(有匹配变压器的伺服系统在变压器副边)输入的有功电功率,输出机械功率对输入电功率的百分比称为伺服系统效率,结果应符合4.16的规定。
伺服系统的工作区由连续工作区和间断工作区组成,在专用技术条件中应给出具体的工作区图。
连续工作区的试验在n0、n1、nN三点进行。n0为接近零速的某一低速,建议选为0.01nN;n1转速是恒功率输出转速范围中的最低转速点,如果这一点不存在则应选n1=0.75nN。在上述三点施加对应的负载转矩连续运行,测量电机的温升曲线,稳定温升应符合4.17的规定。
间断工作区的试验,按照专用技术条件规定的短时工作时间和短时允许的过载倍数在n0和nN两点测试,结果应符合4.17的规定。
5.18 噪声试验
将伺服系统置于消声室内,试品边缘与墙壁距离不得小于1000mm,周围不应堆放其他物品和障碍物。
试验使用精密声级计A计权网络,传声器面向试品并与地面平行或垂直,与试品的距离为1000mm,伺服系统四周及上方各取一个测量点并应避免与风机同轴。
在额定转速空载条件下,测量各个点上的噪声值。
测量结果应符合4.19的规定。
在额定电源电压变化+10%~-15%条件下,进行伺服系统对于电源线低频重复干扰传导敏感度试验。试验按图5接线。
a 差模干扰试验接线图
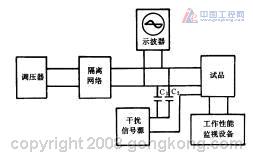
b 共模干扰试验接线图
续图5
试验在伺服系统空载最低转速nmin下进行,将差模干扰逐渐提高到10级或共模干扰逐渐增加到25级,系统不应出现故障。
5.20 冲击试验
伺服系统的电机冲击试验按电机专用技术条件所规定的方法进行。驱动器按正常工作安装方式紧固在冲击台上,调节冲击加速度为300m/s2、冲击脉冲波形为半正弦波持续时间为11ms±1ms,冲击次数为3次。试验后,受试品应符合4.21的规定。
伺服系统的电机振动试验按电机专用技术条件规定的方法进行,驱动器按表4的规定进行振动试验,试验后应符合4.2l的规定。
表4
驱动振幅 3.5mm(10~15Hz)
2.0mm(15~30Hz)
0.35mm(30~60Hz)
0.15mm(60~150Hz)
时 间 10min(每个危险频率点)
5.21.1 试验顺序
a. 初始振动响应检查;
b. 定频率振动试验;
c. 扫频试验;
d. 最后振动响应检查。
5.21.2 初始振动响应检查
在三个轴向上按表5规定的初始振动响应检查方法进行扫频振动,并记录每个轴向上的危险频率点,当危险频率点较多时,每个轴向上取4个较大的危险频率点。
表5
频率范围 10~150Hz
扫频速度 ≤1oct/min
驱动振幅 0.15mm
5.21.3 定频率振动试验
对三个轴向上的危险频率点分别按表5规定的定频率振动试验进行试验。
如在初始振动响应检查中无明显的危险频率点,则应在150Hz的频率上,在三个轴向上以0.15mm的振幅各保持10min的振动。
5.21.4 扫频试验
驱动器按表6规定的扫频试验方法进行试验。
表6
频率范围 10~150Hz
驱动振幅 0.15mm
扫频速度 ≤1oct/min
次 数 20次
5.21.5 最后振动响应检查
重复5.21.2的试验,并观测危险频率点的频率,与初始振动响应检查时的记录对比,危险频率点不应有较大的变化。
伺服系统的短路保护试验在空载条件、额定电压下进行。逐渐提高转速同时使电机任意两根相线之间突然短路直至伺服系统出现短路保护,恢复正常接线,然后重新启动伺服系统应能正常工作。
5.23 过载保护试验
过载保护试验应按照产品专用技术条件的过载保护电流-时间关系表的数据进行检查试验。如果专用技术条件仅给出电流-时间曲线,则最少应取最大过载能力、过载50%和过载10%,共三点进行检查试验。
试验时将电机转速调定在0.01nN,并且监视电流实际值,将负载增加到规定的过载能力,同时用秒表计时,记录过载保护动作的时间,应符合专用技术条件的规定。
交收试验允许只检查最大过载能力一点的过载保护,并且允许不使用加载设备而采用电机转子堵转的方法使用电流达到最大过载电流值。
5.24 低温试验
5.24.1 工作低温试验
将伺服系统放入低温箱内,使箱内温度降至0℃,至少保持30min后,伺服系统应能正常运行不小于4h,结果应符合4.2的规定。
5.24.2 贮运低温试验
伺服系统放入低温箱内,使箱内温度降至-40℃,至少保持30min后,存放4h。试验期满后,使箱内温度逐渐上升至正常大气条件,并在此条件下恢复4h,箱内升温时间不计入恢复时间。然后通电,伺服系统应能正常运行。
5.25 贮运高温试验
将伺服系统放入高温箱内,使箱内温度升到55℃,至少保持30min,存放4h,试验期满后,将温度逐渐降至正常大气条件,并在此条件下恢复4h,然后通电,伺服系统应能正常运行。
5.26 恒定湿热试验
将伺服系统放入湿热箱内,温度调至40℃后,至少保持30min,然后开始输入水汽,并在1h内使湿度达到(93+2-3)%(40℃不凝露),此两项时间不计入试验时间。试验时间48h,试验期满后立即测量绝缘电阻,应符合4.3.1的规定。试验后,在正常大气条件下恢复12h然后通电,伺服系统应能正常运行。
5.27 可靠性试验
可靠性试验方法应参照GB 5080.1在专用技术条件中做出具体规定
6 检验规则
6.1 检验分类
a. 交收检验(出厂检验)。
b. 例行检验(型式检验)。
检验项目见表7。
表7

注:1)在交收试验中,调速比允许在空载下测试。
2)在交收试验中,高温连续运行允许不带电机通电运行。
3)在定期进行的例行检验中允许免试。
6.2 交收检验
批量生产或连续生产的伺服系统,每台都应进行交收检验,检验中出现任一故障则应中断试验,查明原因排除故障后,从该项目开始继续进行试验,若再次出现故障时应判为不合格。
6.3 例行检验
产品定型时应进行例行检验,连续生产的产品应定期进行例行检验,更改设计和主要工艺或更换主要元器件或材料时应进行例行检验。例行检验的样品应在交收检验合格的产品中随机抽取,数量不小于3台。检验中出现故障或任一项通不过时,应查明故障原因,对产品进行修复,然后重新进行该项目检验,若再次出现故障或该项目通不过时,仍按上述规定处理。
在重新进行例行检验中又出现某一项通不过时,则判定该产品例行检验不合格。
7.1标志
7.1.1伺服系统产品在明显部位应有铭牌标记,并且保证在整个使用期内不脱落。铭牌至少应包括以下内容:应有“型号”、“名称”、“制造日期”、“出厂编号”及“制造厂家”。
7.1.2 包装箱外壁应有符合GB 191规定的标志和说明。
7.2 包装
7.2.1 伺服系统的包装应在专用技术条件中作出规定。
伺服驱动器包装箱按产品的重量、大小选择适当的箱档、氧化钢带或包角等进行加固。包装箱内壁应用防雨涂覆,或采用塑料薄膜、塑料复合材料、聚乙烯薄膜将伺服驱动器包装,并装入吸湿剂,然后装入包装箱内;伺服驱动器在箱内应用泡沫塑料固定,以保证伺服驱动器等在贮存、运输、装卸过程中不因包装的原因发生损坏和降低质量。
伺服系统中的电机另行包装,包装可参照GB 5872—86的规定。
7.2.2 包装箱内应有装箱单,装箱单应包括以下内容:
a. 产品型号、名称;
b. 从产品上拆下来包装的零、部件名称,数量;
c. 随机附件名称、规格数量;
d. 随机备件名称、数量;
e. 随机技术文件名称。
随机提供的成套文件应包含下列内容:
a. 使用说明;
b. 维修说明;
c. 连接说明;
d. 产品合格证。
7.3 运输、贮存
7.3.1包装好的产品应适应公路、铁路、航空等运输。
7.3.2 长途运输时,产品不得放在露天车厢、仓库中,应注意防雨、防尘,防止机械损伤。
7.3.3 存放产品仓库的气候条件应符合专用讲述条件的规定,室内应无酸、碱及腐蚀性气体,无强烈的机械振动、冲击、强磁场作用。
7.3.4 产品在制造单位库房中存放超过一年时,应在出厂前重新进行交收检验。

- 插补算法和多轴联动有关系吗
 [12194]
[12194] - 双轴同步控制问题求助?[10708]
- 松下和安川电机的增量编码器...[7457]
- 步进电机的电源如何选?相电流...[20793]
- 松下A5伺服运行抖动怎么调整...[43387]
- 力矩电机如何控制?[9151]
- 伺服增益参数调整技巧,便于现...[5727]
- 有没有一台PLC可以搞定五轴六...[16262]
- 伺服电机驱动器的结构组成[6197]
- 加速度单位[8497]

官方公众号

智造工程师
-

 客服
客服

-

 小程序
小程序

-

 公众号
公众号











 工控网智造工程师好文精选
工控网智造工程师好文精选
