【KEWEI】科威经济型DS4系列单板伺服驱动器使用说明(29) 点击:588 | 回复:1

发表于:2023-04-13 16:00:14
楼主
电磁制动器
电磁制动器(保持制动器、失电制动器)用于锁住与电机相连的垂直或倾斜工作台,防止伺服电源失去后工作台跌落。实现这个功能,需选购带制动器的电机。制动器只能用来保持工作台,绝不能用于减速和停止机器运动。
一、电磁制动器抱闸流程
抱闸流程分为三种情况:“报警”、“断使能”、“断电或瞬间掉电”。
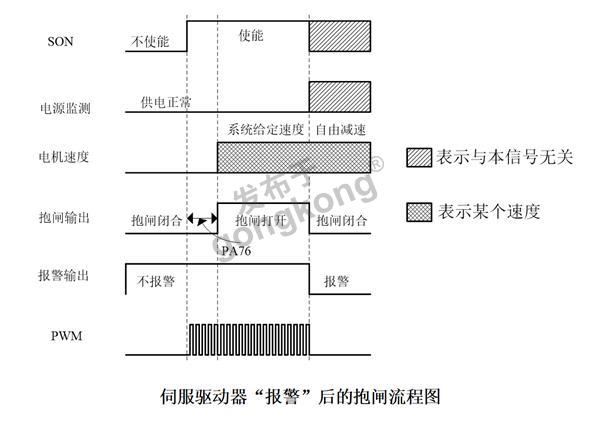
1) 正常运行时伺服驱动器“报警”
伺服驱动器发生任何“报警”时,立即进入抱闸流程,此时不论电机处于何种运行状态,立即关断PWM,立即输出报警信号,立即输出抱闸抱紧信号。
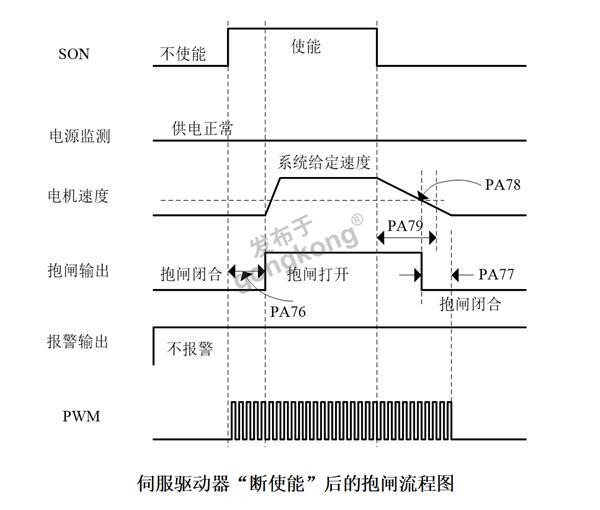
2) 正常运行时伺服驱动器“断使能”
伺服驱动器发生“断使能”时,立即进入抱闸流程。
首先,伺服驱动器判断此时电机速度的绝对值是否在PA78设定的阀值之下:
如果在阀值之下,则立即输出抱闸信号,并在经过PA77设定的时间之后关断PWM;
如果在阀值之上,则伺服驱动器使伺服电机按照PA47设定的减速度受控减速,并在电机减速到PA78设定的阀值以下或者PA79设定的时间到达后,输出抱闸信号,并在经过PA77设定的时间之后关断PWM。
如果断使能之后又恢复了使能,则无需重新上电,待此次抱闸流程走完之后,伺服驱动器会再次进入松闸流程,恢复到正常工作状态。
3) 正常运行时伺服驱动器“断电或瞬间掉电”
伺服驱动器发生“断电或瞬间掉电”从而导致伺服报警时,立即进入抱闸流程。该抱闸流程与“报警”导致的抱闸流程一致。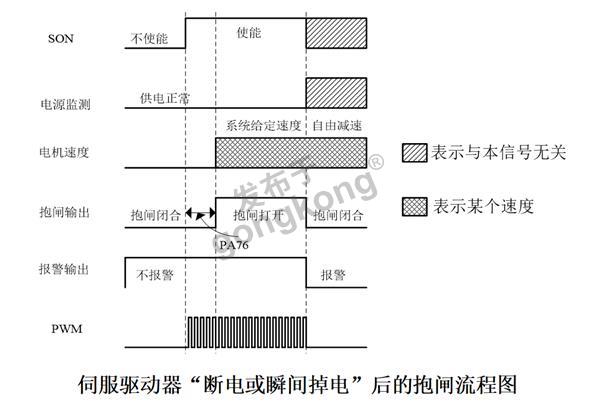







楼主最近还看过
热门招聘
相关主题
- 伺服回原点
 [10613]
[10613] - 一个伺服驱动器能不能驱动两...[5611]
- 松下伺服电机参数设置软件[6323]
- 关于伺服电机的油封问题。[5431]
- 各数控厂家系统比较 [10412]
- 伺服电机发热好严重是怎么回...[30309]
- 伺服系统中如何用电机零脉冲...[13253]
- 直线电机参数[7027]
- 计算机如何实现x,y,z轴三维运...[6845]
- 伺服控制器位置控制基本参数...[6550]

官方公众号

智造工程师
-

 客服
客服

-

 小程序
小程序

-

 公众号
公众号











 工控网智造工程师好文精选
工控网智造工程师好文精选
