【KEWEI】科威DS4系列单板伺服反馈脉冲的作用 点击:588 | 回复:0

发表于:2023-04-06 15:25:38
楼主
科威DS4系列单板交流伺服驱动器主要针对小功率通用性强的工业运动控制场合,内置功能(如内置多种运行速度,点动运行)可供简单控制,但更多的是与上位机(运动控制器等)进行连接控制,如脉冲输入进行位置控制,模拟量输入进行速度控制或张力控制。
上位机因控制要求,常常需要获取伺服驱动器的当前状态。如伺服驱动器工作在速度控制方式,而上位机需要获取伺服的当前位置信息,在上位机进行位置控制,目的是确保位置控制时,速度变化与其他单元协调,不致于有剧烈的变动。DS4伺服驱动器不管工作在位置、速度或力矩模式下,都提供伺服位置反馈信息。
科威DS4系列单板伺服所提供的位置反馈脉冲,也可作为其他伺服驱动器的参考脉冲,进行位置跟随,或同步协调控制。
科威DS4系列单板伺服采用的编码器是17位绝对值单圈或多圈编码器,实际检测分辩率达到131,072 p/r,当电机速度达到1500 rpm时,即每秒25转,频率达到25*131072=3,276,800 Hz。依据目前的使用精度以及上位机的计数频率,DS4将检测精度标准化为10000 p/r。用户根据需要,通过修改分频系数(对应参数为PA110),进一步降低伺服位置反馈额定工况时的频率。如每圈反馈脉冲数为1250 p/r(参数PA110=3),当速度达到3000 rpm时,位置反馈频率为 50*1250=62500 Hz,该频率的脉冲接入上位机,应该是比较合适的。
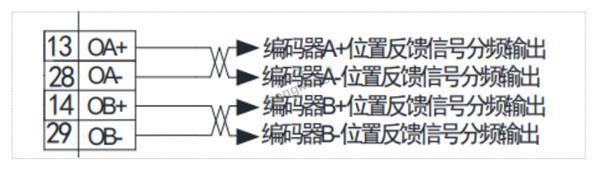
编码器的位置反馈输出OA/OB是AB相脉冲输出,编码器零位脉冲OZ输出可通过多功能输出端子DOx输出。









楼主最近还看过
热门招聘
相关主题
- 请教步进电机驱动器和控制器...
 [7846]
[7846] - 求助:伺服电机失控飞车[6901]
- 伺服电机的最低稳定运行速度...[6460]
- 求plc控制伺服定长追色及色标...[13234]
- 伺服学习资料[6431]
- 伺服编码器输出为差动驱动如...[19596]
- 好书共赏!向大家推荐3本业内...[6081]
- electronic cam[5836]
- 请教张力控制的问题[8176]
- 西门子SIMOTION SCOUT V4.3....[20571]

官方公众号

智造工程师
-

 客服
客服

-

 小程序
小程序

-

 公众号
公众号











 工控网智造工程师好文精选
工控网智造工程师好文精选
