stm32单片机控制台达伺服电机 点击:3826 | 回复:29







楼主最近还看过
“ADSA-B2确实是掉电自动保存,之前测试中电机没有转动是因为我没有开启伺服启动(servo on)”
servo on不是接线了么?为什么没有通过控制信号开启?还是开启无效?
“按键一没有使能,按键二按下去的时候(高电平),电机也会转动,但与按键一按下去电机的方向相反,同样电机的速度也很慢”
“但按键二按下时:为高电平(正反转就是按照37接口的高低电平来决定正转还是反转),电机逆时针转的速度很快,但当我把按键二设为低电平时,电机确实会反转(顺时针),但是电机转动速度很慢”
疑似脉冲、方向信号不稳定。
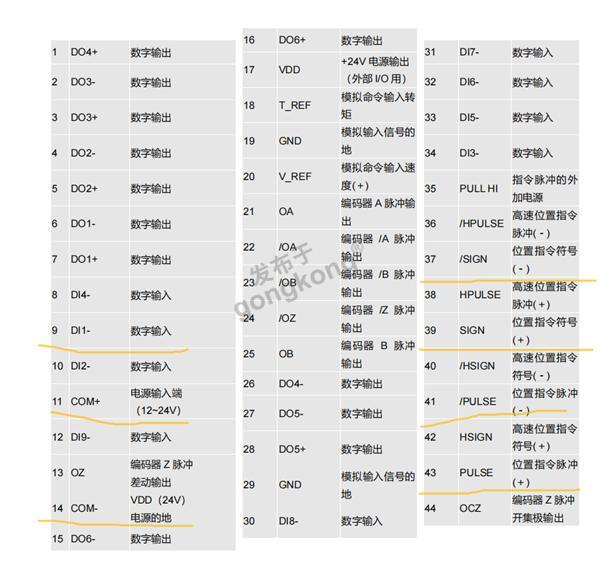
刚把b2伺服的手册找出来对了一下,i/o口的脉冲方向信号的引脚定义和您在帖子贴出来的不一样。接线可能有点问题,如果用39和43,应该接5V信号系统(3.3V原则上也可以),不是12V。使能信号要求是24V,也不是12V
"刘岩利" 的回复,发表在21楼
对内容: 【“ADSA-B2确实是掉电自动保存,之前测试中电机没有转动是因为我没有开启伺服启动(servo on)”servo on不是接线了么?为什么没有通过控制信号开启?还是开启无效?“按键一没有使能,按键二...】进行回复:
-----------------------------------------------------------------
servo on 是接线了,但貌似没有用,然后我用P2-30(强制伺服启动)开启。PS:有可能是我控制信号的电压不足,我使用的是12V,手册上说明是24V.
您说的第二个问题我觉得应该不是信号不稳定的原因,我之前也考虑过这个因素,但我多次应用在步进电机上,都可以控制步进电机。我认为的原因也可能是电压的不足,我所有的信号都用的12V ,目前正在试24V.
,目前正在试24V.
您说的接39,43号接口是使用高速差动方式控制,然后用5V系统。我用的是集级开路的方式,所以接线与您想的不一样。
"陌上倾城~凤舞妍" 的回复,发表在22楼
对内容: 【"刘岩利" 的回复,发表在21楼 对内容: 【“ADSA-B2确实是掉电自动保存,之前测试中电机没有转动是因为我没有开启伺服启动(servo on)”servo on不是接线了么?为什么...】进行回复:
-----------------------------------------------------------------
“您说的第二个问题我觉得应该不是信号不稳定的原因,我之前也考虑过这个因素,但我多次应用在步进电机上,都可以控制步进电机。”
即使是空载,伺服驱动器的电磁干扰也完全不是步进可比的
“我认为的原因也可能是电压的不足,我所有的信号都用的12V,目前正在试24V.”
如果您不接35脚,就不要接更高的电源了。台达伺服在光耦外串接的电阻只有100欧姆,如果长时间接24V,内部电阻的功率不一定够。
“您说的接39,43号接口是使用高速差动方式控制,然后用5V系统。我用的是集级开路的方式,所以接线与您想的不一样。”
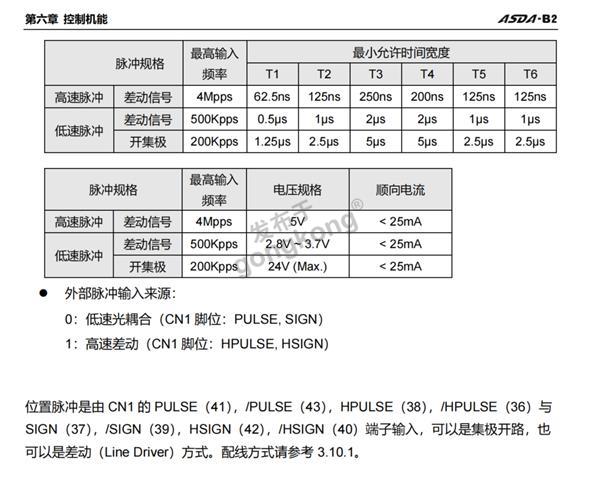
是您误会了,如果高速脉冲口,内部是差动接收电路,根本就不能用集电极开路的信号源控制,只能用真差动信号。低速脉冲口内部是光耦结构,接差动信号源,接共阳极(集电极开路)或者共地的信号源都可以。
差动接收电路是依据电压差的正负在区分逻辑状态,压差大于+0.2V为正,压差小于-0.2V为负,压差在+0.2V到-0.2V之间为不稳定状态。如果不是真的差动信号源,是给不出反向压差的,信号就不可能稳定传输。
如果输出信号是推挽式的,倒是可以考虑在差动的另一端接个平衡电阻,自己制造反向压差。但是集电极开路的信号源式无论如何也不成的。
光耦接收电路是以内部发光二极管有没有足够的发光电流区分逻辑状态的,正向压差够大,电流就够大,反向压差和0压差都会造成发光电流为零。所以它什么样的信号源都可以匹配。
步进电机因为本身设计的转速就不会很快,所以驱动器上通常只有光耦接口,而近十几年的伺服驱动器上,一般都同时设计出高速的差动接口和高兼容性的光耦接口。
“您说的第二


- 请教富士伺服电机编码器调零...
 [5739]
[5739] - 光栅尺与驱动器接线[7465]
- 位置模式下伺服的指令脉冲、反...[10064]
- 请教老师西门子交流伺服电机...[5733]
- 求助:plc如何控制多台步进电...[6073]
- 关于步进电机问题( 刘岩利及...[9239]
- 伺服电机定位过程中的力矩控...[17535]
- 伺服电机转子惯量匹配问题[7353]
- 急需 松下交流伺服电机驱...[5598]
- 伺服驱动器的功率一般是怎么...[8884]

官方公众号

智造工程师
-

 客服
客服

-

 小程序
小程序

-

 公众号
公众号











 工控网智造工程师好文精选
工控网智造工程师好文精选
