【求助】【求助】【求助】CANOPEN控制台达伺服A2回原点问题! 点击:2621 | 回复:3

CANOPEN控制台达伺服驱动器A2,使用回零模式回原点。
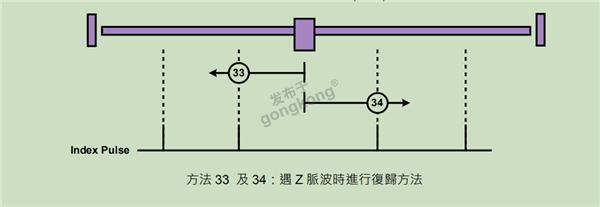
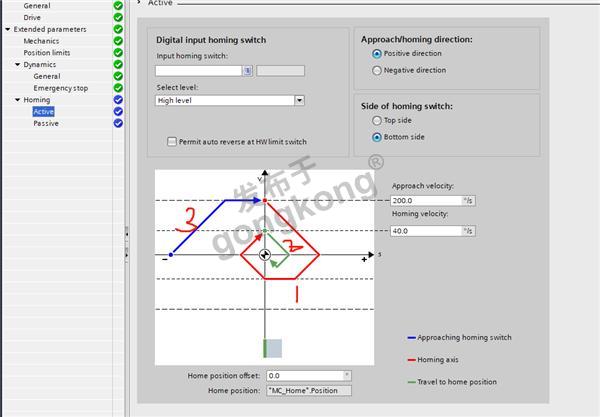
1.如果使用模式33或34,一切正常,此时6062h为0,6064h为0,退出回零模式后回到IP模式(因为之前都是用的IP模式)后一切正常。
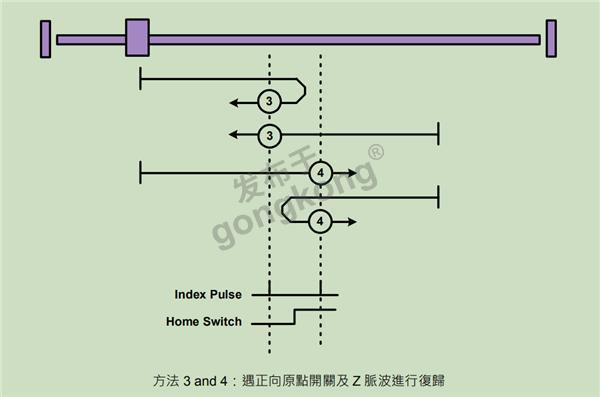
2.如果使用其他模式,遇到减速点信号就马上停下来了,不会去寻找Z信号。比如用模式3,当收到SHOM信号后就马上停下啦了(即遇到减速点就马上停下来了,而不会继续运行直到遇到第一个Z信号才停止),(我使用的是模拟SHOM信号,P3-06配置为3FFF,P2-10~P2-17默认配置,往P4-07写入0x27模拟SHOM信号),此时6062h为0,6064h不为0,6041h为8617;如果退出回零模式回到IP模式(然后SERO_ON),此时电机会快速回转,转到回原点前的位置,此时6062h为0,6064h为0,之后一切正常。
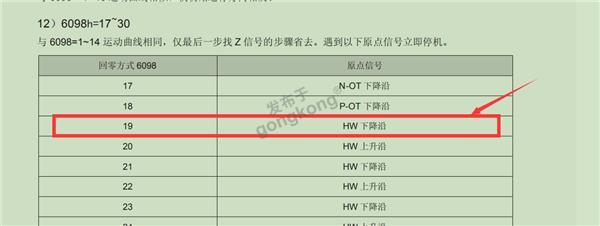
3.如果使用不需要寻找Z信号的模式,如回零模式19。当收到SHOM信号后就马上停下啦了,(我使用的是模拟SHOM信号,P3-06配置为3FFF,P2-10~P2-17默认配置,往P4-07写入0x27模拟SHOM信号),此时6062h为0,6064h不为0,6041h为8617;如果退出回零模式回到IP模式(然后SERO_ON),此时电机会快速回转,转到回原点前的位置,此时6062h为0,6064h为0,之后一切正常。






楼主最近还看过

回复内容:
对: 郭远林 你这个问题,只有在现场用不同的回原点方式达到你现场所需... 内容的回复!
-------------------------
谢谢!这的确要不断去实践去理解。现在问题解决了,之前我对DI码理解完全错了,大概解决的方法是。(希望能帮助到其他挣扎于台达CANOPEN回原点问题的朋友们,反正我是挣扎了半个月了)
要去P2-10到P2-17(即DI1到DI8)配置DI码以及接点。
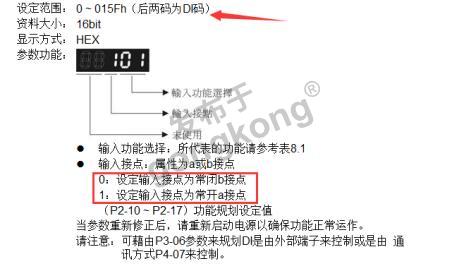
将P3-06配置为0x3FFF即使用SDI,然后向P4-07写数据,即可模拟信号了。
如将P2-10配置为0x0124(DI1为ORGP信号,为常开a接点),往P4-07写0x0001(即DI1为ON),就是模拟信号有效,往P4-07写0x0000(即DI1为OFF),就是模拟信号无效,这样上升沿、下降沿也有了。
哈哈哈哈,初次接触工控很多理解都有偏差,欢迎纠错!

- 搞横切的这么多,早想找机会介...
 [15731]
[15731] - 总线型伺服是工作在何种工作...[6865]
- 伺服驱动器的功率一般是怎么...[8884]
- 伺服电机UVW动力线相序接错,...[35048]
- 力矩电机如何控制?[9152]
- 伺服发展方向讨论话题![原创...[8779]
- 步进电机驱动器细分和不细分...[8276]
- 请教高手:力士乐伺服器报警F...[5914]
- 包装机械色标跟踪原理[19972]
- PLC走X,Y 轴直线圆弧插补好...[6006]

官方公众号

智造工程师
-

 客服
客服

-

 小程序
小程序

-

 公众号
公众号











 工控网智造工程师好文精选
工控网智造工程师好文精选
