翠欧TRIOMC403P823连接松下驱动作业 点击:1221 | 回复:3

记录使用MC403连接松下驱动器进行闭环控制的过程,两个设备都是第一次用,有不对的地方请大佬指出。
驱动器:
松下A6 MCD多功能型伺服(型号8位F,位置控制型E和通用通讯型G不支持模拟量输入)。将控制器调整为速度模式:
P0.01 改成1,需要上电生效,参考松下设置该类参数的方法
P3.02 可以调整模拟量与转速之间的关系
P3.03 可以调整指令的方向
P0.11 可以修改电机每圈旋转输出的脉冲数,记录下来后边在trio中设置要用
P4.22 调整零漂
连接线:
按速度模式接线,由于主要测试用,son等I/O没有接,主要是将编码器AB项和模拟量输入接到TRIO上。网上有资料说信号地要接(5口),不然会损坏控制器,谨慎起见就接了ps:后来细看松下说明书,这里是强调过要接的。
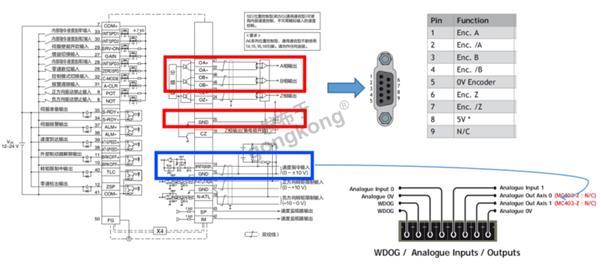
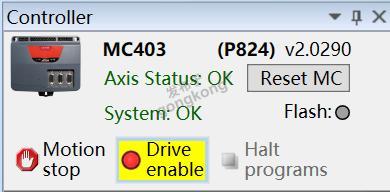
TRIO
M403控制器P823(motion perfect软件里读出来是P824,但装置背后铭牌写的P823,也不知道到底是哪个),支持两路模拟量输出;三个db9接口可配置成编码器输入,其中两个可作为伺服反馈,因此可以做两个模拟量伺服控制。
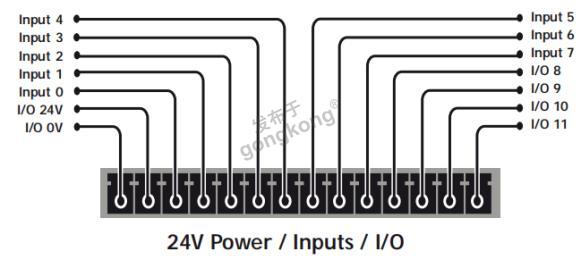
在使用模拟量输出时,要注意需要将trio的中间IO端子24v供电。模拟量输入输出和该IO端子使用同样的电源。
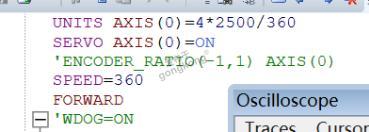
在trio中将轴类型设为ATYPE=44,事实上对与模拟量轴,还有别的可以选,这里虽然没接z但选了这种。我是在MC_CONFIG文件里写的,之前直接写在程序里也行。

UNITS 是单位的设定,设定方法参考P0.11,如P0.11=2500,认为电机转一圈为360deg,考虑四倍频,UNITS=4*2500/360。连接完成后,伺服上电,可以使用trio的axis parameter调整零漂——静止时观察ENCODER不动即可。
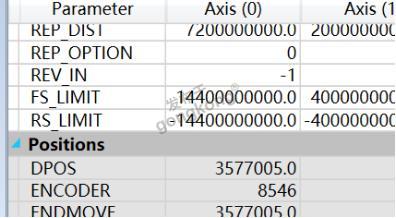
在进行闭环控制前,要确认模拟量输出方向和编码器方向是否相同,可以先SERVO=OFF,使用DAC指令输出一个正电压,看编码器值是否增大。如果相反可以用encoderratio=(-1,1)更改编码器方向。如果上来就用闭环,在模拟量方向和 编码器方向相反会形成正反馈,导致飞车。
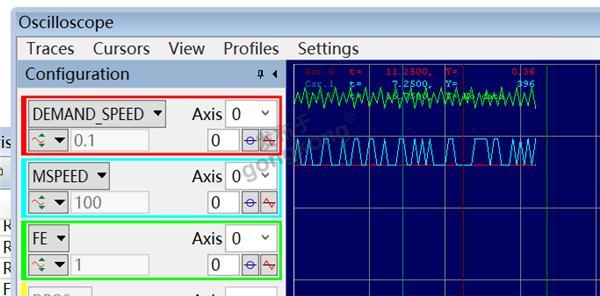
编写简单的运动程序,测试电机运动,让电机以360u/s运动,即60rpm,通过驱动器D01.SPD查看电机转速为60,调试完成。这里的servo=on意思为使用伺服控制,如果为off,可以用dac指令单独让模拟量输出,调试开始时可以用这个方法验证模拟量输出是否正确。M403是12位的模拟量输出,1024时输出为5V。此外也可通过trio的oscilloscope查看曲线





楼主最近还看过

- 关于运动控制的虚轴
 [17241]
[17241] - 伺服控制器的速度控制精度一...[10104]
- 三菱伺服放大器MR-J2S-70B报...[10675]
- 伺服电机不能回原点[13859]
- plc与伺服交流电机的连接问题...[11182]
- 计算机如何实现x,y,z轴三维运...[6845]
- 关于伺服偏差计数器清零的问...[17377]
- 请教:数控机床上各系统的配置...[6834]
- 伺服电机为什么不能直接接交...[6525]
- 求救:为什么伺服电机发烫?[8479]

官方公众号

智造工程师
-

 客服
客服

-

 小程序
小程序

-

 公众号
公众号











 工控网智造工程师好文精选
工控网智造工程师好文精选
