激光加工运动控制原理——振镜工作原理 点击:1950 | 回复:2

1.振镜工作原理
激光振镜是一种专门用于激光加工领域的特殊的运动器件,它靠两个振镜反射激光,形成 XY 平面的运动。激光振镜不同于一般的电机,激光振镜具有非常小的惯量,且在运动的过程中负载非常小,只有两个小的反射镜片X 和 Y,分别用不同的电机控制偏转,系统的响应非常快。
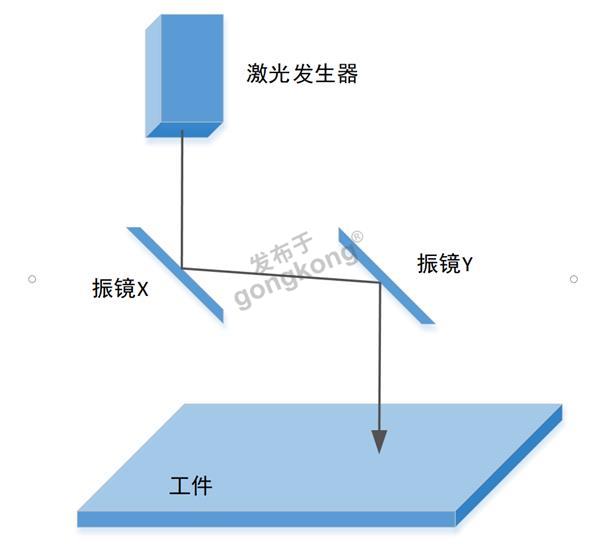
激光振镜运动两种基本的运动:一种为跳转运动,一种为打标运动。
跳转运动的过程中,轴移动到要加工的位置,激光呈关闭状态,不影响轨迹的加工,因此可以以很大的速度运动。打标运动过程中,激光呈开启状态,进行轨迹的加工,因此用户需要根据实际加工要求设置合适的运动的速度。
振镜是一种优良的矢量扫描器件。它是一种特殊的摆动电机(激光振镜),基本原理是通电线圈在磁场中产生力矩,但与旋转电机不同,其转子上通过机械纽簧或电子的方法加有复位力矩,大小与转子偏离平衡位置的角度成正比,当线圈通以一定的电流而转子发生偏转到一定的角度时,电磁力矩与回复力矩大小相等,故不能象普通电机一样旋转,只能偏转,偏转角与电流成正比。
2.振镜控制系统基本结构
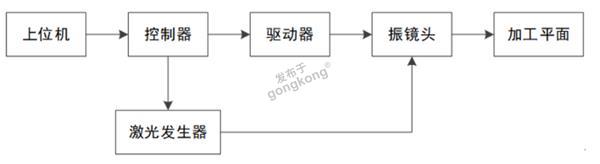
振镜系统的由以上几个部分组成一个基础系统,其中振镜头主要元件为 X/Y 两个反射镜片、分别控制X/Y 镜片旋转的两个电机,根据实际需求还可加入人机操作系统、编码器等。
3.对控制器的基本要求
因为激光打标机是靠 X/Y 振镜偏转的配合,将激光反射到工作台面上,进行精确的雕刻。而振镜的控制是由控制器开环控制的,所以要求必须为线性,即输入信号同偏转角度之间为线性关系。因振镜是快速精密机械,所以要求从一个工作状态到另一个工作状态要求加速度越大越好,这样打标空等时间就无限小。
振镜运动采用缓冲区运动方式,即用户需要向轴运动缓冲区传递运动及工艺数据,然后启动缓冲区运动,运动控制器则会依次连续执行用户所传递的运动数据,直到所有的运动数据全部运动完成。 在激光振镜运动控制系统中不但有运动的控制,还有激光的控制。如何有效地处理振镜运动和激光开关的配合是一个很重要的问题,只有有效的协调了激光和运动的关系,才能运动出精确的轨迹。
运动控制:打标运动时,激光会按照设定的打标速度沿着给定的打标轨迹运动,在执行打标相关指令 时,激光振镜运动控制器会自动开启激光。如果下一条仍是打标指令,激光一直呈开启状态,直到最后一 条打标指令结束,或缓存区指令执行完毕,中途在缓冲区若遇到跳转指令,则激光自动关闭,直到遇到打 标指令,激光才重新开启。开始运动前为保证打标轨迹正确需调整振镜坐标,同时清空缓冲区。
激光控制:主要包括控制激光的开关控制与发出激光的时长,控制激光的开断使用 OP 指令,激光能量 的控制可根据激光器的不同,对应通过模拟量,数字量输出口,以及输出口 PWM 的占空比对应控制能量的 大小。
4.主要应用
主要用于激光打标,包括激光切割、舞台灯光控制、激光打孔等。是一种非接触式、无污染、无磨损 的新标记工艺,采用自动化控制,可靠性大大提高。激光打标是利用高能量密度的激光束,随着激光束在 材料表面有规律的移动,同时控制激光束的开断,使目标材料表面发生物理或化学变化,激光束就可以在 材料表面加工出一个指定的图案。
相比传统标记工艺,激光打标有如下优点: 标记速度快,字迹清晰。 非接触式加工,污染小,无磨损。 工作方便,防伪能力强。 高速自动运行,生产成本低,运行可靠。
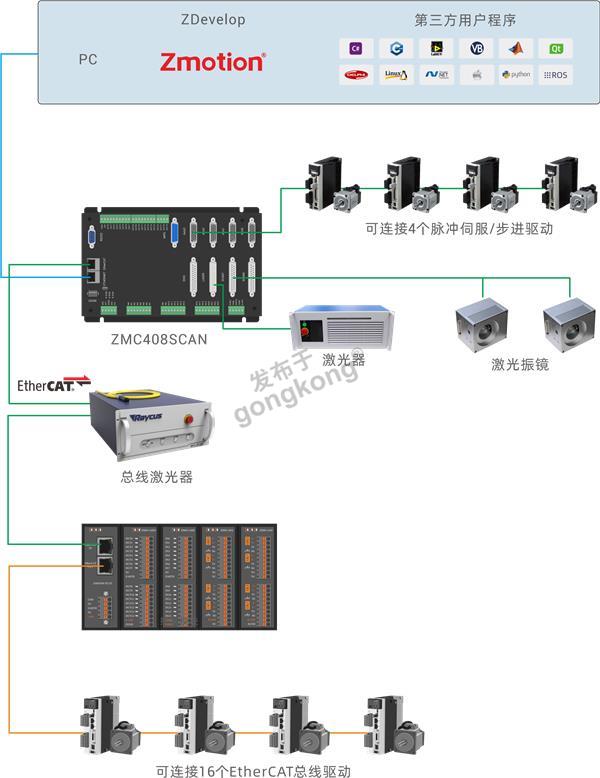
5.ZMC408SCAN 控制器激光振镜接口
ZMC408SCAN是正运动技术新推出的一款支持EtherCAT总线的开放式激光振镜运动控制器,专为工业激光+振镜+运动控制方面的应用而设计。通过EtherCAT总线和脉冲轴接口能实现多轴运动控制。
控制器包含多种类型的激光接口,可通过8路高速输出口(支持PWM功能和PSO功能),实现高精度多轴联合运动与激光的同步控制。
内部集成了激光控制、振镜控制、总线轴/脉冲轴控制的独立式运动控制器。控制器本身支持4路脉冲轴控制和两组XY振镜轴接口(带振镜反馈),支持最多16路运动轴的复杂的连续轨迹控制需求,可实现振镜轴+脉冲轴+总线轴的混合插补。

控制器的接口说明如下表:
标识 | 接口 | 个数 | 说明 |
RS232 | 232串口 | 1个 | 采用MODBUS_RTU协议 |
RS485 | 485串口 | 1个 | 采用MODBUS_RTU协议 |
CAN | CAN总线 | 1个 | 连接CAN扩展模块或控制器 |
ETHERNET | 网口 | 1个 | 采用MODBUS_TCP协议,通过交换机扩展网口个数,至少包含两路网口通道 默认IP地址192.168.0.11 |
EtherCAT | 总线口 | 1个 | EtherCAT总线接口,接EtherCAT总线驱动器和扩展模块 |
E+24V | 主电源 | 1个 | 24V直流电源供电 |
UDISK | U盘接口 | 1个 | 插入U盘设备 |
IN | 数字量输入 | 24个 | NPN类型,内部24V供电,输入0-3具有锁存功能 |
OUT | 数字量输出 | 12个 | NPN类型,内部24V供电,输出0-7具有PWM功能,输出0-7具有精准输出和PSO功能 |
AD | 模拟量输入 | 2个 | 分辨率12位,0-10V |
DA | 模拟量输出 | 2个 | 分辨率12位,0-10V |
Axis | 脉冲轴接口 | 4个 | 每个接口包含差分脉冲输出和差分编码器输入 |
SCAN | 振镜接口 | 2个 | 激光振镜接口,带反馈,采用XY2-100协议 |
LASER | 激光控制接口 | 1个 | 激光电源控制端口,支持IPG、YLR、YLS等类型激光电源 |
MPG | 手轮接口 | 1个 | 5-24V手轮信号输入 |
EXIO | 扩展IO接口 | 1个 | 灵活定制转接板,可扩展SPI、FIBER、YGA等其它类型激光电源控制接口 |
PC可通过串口和网口连接到控制器,下发指令给控制器处理。通过RS232、RS485和网口可与外部设备通讯。连接扩展的IO模块可使用EtherCAT或CAN总线接口。
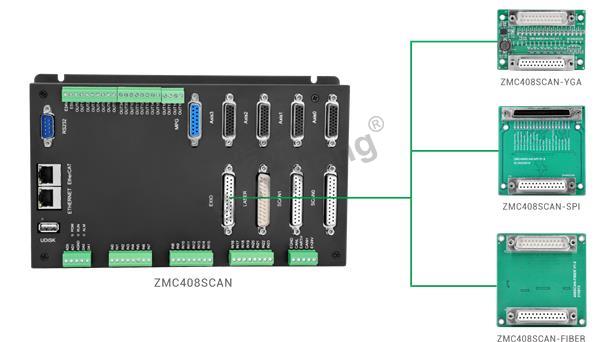
具备标准的激光振镜接口SCAN和激光电源控制接口LASER,同时提供一个EXIO扩展接口灵活扩展外设。
运动与激光控制的参考架构如下图:
EXIO扩展IO接口:
激光电源控制接口除了定义好的LASER之外,还有个EXIO接口可灵活配置,做数字IO接口或其他激光器的转接口,转接板可灵活定制。





楼主最近还看过

- 一个变频器接两个电机??
 [5706]
[5706] - 松下伺服ERR16与ERR18报警有...[17816]
- 想用3轴运动卡,可是不知道如...[6335]
- 请教步进电机驱动器和控制器...[7846]
- 伺服电机断电后为什么还那么...[9041]
- plc怎么和DD马达连接,怎么驱...[6060]
- 位置模式下伺服的指令脉冲、反...[10064]
- 请教高手,伺服参数自整定?[9448]
- 伺服间为什么不能串联接地?[5452]
- 什么是绝对值编码器的“绝对”...[13630]

官方公众号

智造工程师
-

 客服
客服

-

 小程序
小程序

-

 公众号
公众号











 工控网智造工程师好文精选
工控网智造工程师好文精选
