编写运动控制器的多轴直线插补程序 点击:1242 | 回复:2

XPLC864E2内置直线插补算法,支持8个EtherCAT总线轴联合插补和连续插补,可扩展支持12轴插补,采用MOVE直线插补指令和MERGE开启连续直线插补,便可轻松高效完成多轴插补运动。
语法:MOVE(distance1 [,distance2 [,distance3 [,distance4...]]])
1.XY两轴连续插补完成五角星轨迹:
'总线初始化使能EtherCAT总线驱动器
BASE(0,1)
UNITS=10000,10000
SPEED=100,100
ACCEL=1000,1000
DECEL=1000,1000
SRAMP=100,100
DPOS=0,0
MPOS=0,0
MERGE=ON '开启连续插补
TRIGGER '自动触发示波器(1.4695, 1.0676)
'五角星轨迹
MOVEABS(1.4695, 1.0676)
MOVEABS(2.9389, 0.0000)(2.9389, 0.0000)
MOVEABS(2.3776, 1.7275)(2.3776, 1.7275)
MOVEABS(3.8471, 2.7951)
MOVEABS(2.0307, 2.7951)(3.8471, 2.7951)
MOVEABS(1.4695, 4.5225)
MOVEABS(0.9082, 2.7951)
MOVEABS(-0.9082, 2.7951)
MOVEABS(0.5613, 1.7275)(2.0307, 2.7951)
MOVEABS(0.0000, 0.0000)
END
绝对位置—多段直线插补(五角星顶点坐标示意图) 如下所示:
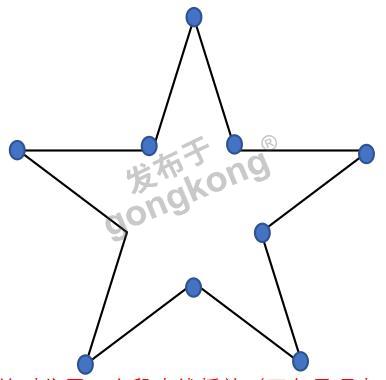
这个轨迹点可以通过CAD导出DXF文件获取。
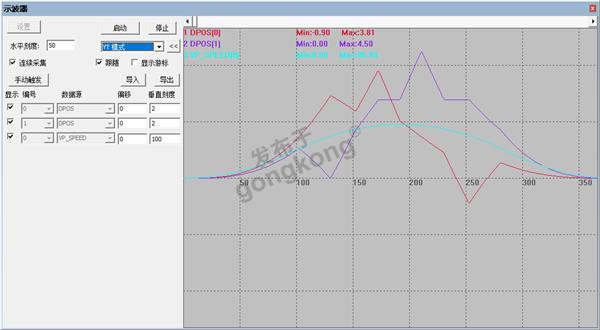
2.示波器采样运动随时间变化的波形:
3.示波器采样两轴插补轨迹:






楼主最近还看过

- 什么是PDFF控制?
 [6564]
[6564] - 请教老师西门子交流伺服电机...[5733]
- 伺服电机定位精度、指令脉冲当...[6707]
- 安川SERVOPACK,型号SGDM-20A...[15825]
- 请教步进电机发热特严重的问...[6387]
- 基础疑问:伺服电机的转子惯量...[5404]
- 请问扭矩为1000N/M的步进电机...[10098]
- 脉冲与频率的关系[12138]
- 伺服电机坏了后,直接替换同型...[6740]
- 关于原点回归与编码器Z相信号...[11266]

官方公众号

智造工程师
-

 客服
客服

-

 小程序
小程序

-

 公众号
公众号











 工控网智造工程师好文精选
工控网智造工程师好文精选
