ZDevelop编程软件连接运动控制器步骤 点击:548 | 回复:0

发表于:2021-08-23 09:43:56
楼主
1.运行程序:在程序输入窗口编辑好程序,点击“控制器”-“连接”或“连接到仿真器”。“连接” 表示连接到控制器,连接方法如下图所示。
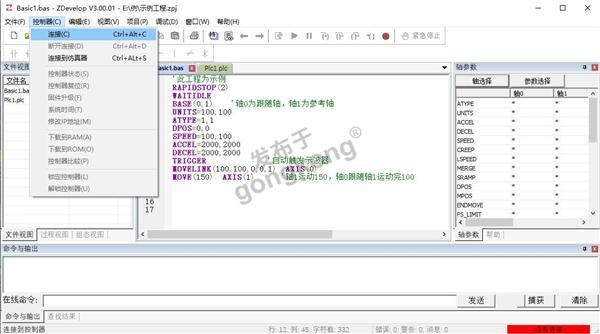
连接是否成功输出窗口会打印出信息提示
2.通过“控制器”-“连接”菜单,可以连接到控制器。 ZDevelop 支持串口和以太网连接到控制器。
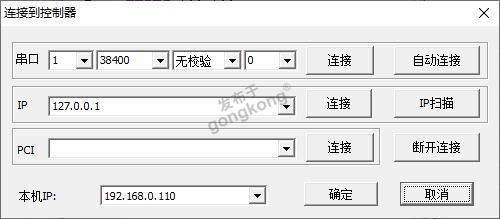
串口连接:选择需要连接的串口编号、设置波特率、校验位、停止位之后,点击连接,连接是否成功 会在软件输出窗口自动打印出相应信息。 网口连接:IP 地址列表下拉选择时,会自动查找当前局域网可用的控制器 IP 地址,选择需要通讯的 IP 地址后连接即可。
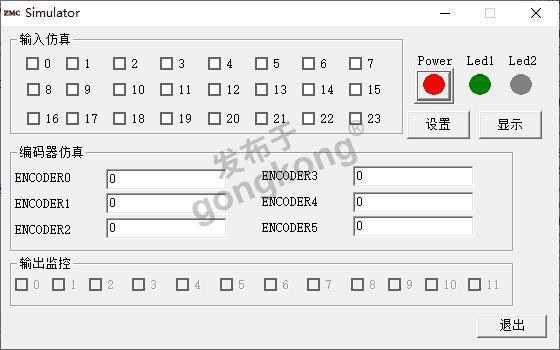
3.ZDevelop 支持离线仿真,在无控制器情况下可以使用。
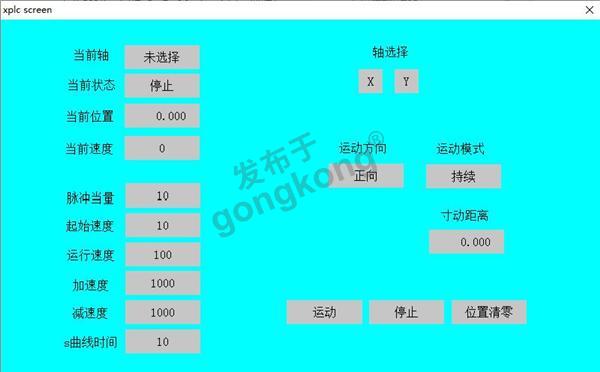
通过 “控制器”-“连接到仿真器”菜单可以自动启动仿真器,或当仿真器启动后可以通过 IP 地址 “127.0.0.1”来连接。 当程序包含 Hmi 工程时,点击“显示”来实现 Hmi 界面仿真。
连接到 ZMC005WEA:

Hmi 示例工程运行效果如下,点击按钮即可直接设置轴参数。
连接到仿真器:

4.点击菜单栏按钮 “下载到 RAM”或按钮 “下载到 ROM”,下载成功命令和输出窗口会有提示,同时程序下载到控制器并自动运行。RAM 下载掉电后程序不保存,ROM 下载掉电后程序保存。下载到ROM 的程序下次连接上控制器之后程序会自动运行。





楼主最近还看过
热门招聘
相关主题
- 讨论一下伺服电机抱闸的控制...
 [12018]
[12018] - 齿轮反向间隙怎么补偿??[5403]
- 伺服电机急停方法[5980]
- 松下A4伺服报ERR13如何处理[5691]
- 安川Sigmawin软件有中文版的...[16091]
- 步进电机驱动器细分和不细分...[8276]
- 恒功率和恒转矩的区别[5561]
- 电子手轮编程[17795]
- 对伺服的整体疑问(高手请进_...[6691]
- 伺服电机直接驱动丝杆发出啸...[7235]

官方公众号

智造工程师
-

 客服
客服

-

 小程序
小程序

-

 公众号
公众号











 工控网智造工程师好文精选
工控网智造工程师好文精选
