浅谈伺服系统三环调节及惯量比 点击:499 | 回复:1

对于大惯量的负载,在做完轴的自整定后,伺服环的增益值可能会很高,这是为了在大惯量负载时获得更好的动态性能。但是通常这样的增益值,是伺服系统基于系统刚性联接情况下计算出来的。如果系统刚性不那么好,那么系统将会变得不稳定,出现嚣叫。
通常要将伺服系统调的稳定,需要将增益值降下来,也就是降低系统响应频率。在这里,响应频率降下来后,系统立刻变得稳定,而且不再啸叫。然而,系统的性能也变软了,而且我们发现已经可以用手转动轴了。也就是说,响应频率的下降直接导致性能的下降。
如果需要更好的性能,那么比较现实的做法,是将电机和负载之间的联接刚性提高。

因此,惯量比多大是“太大了”以及多少合适,其实并没有标准答案。惯量比只是系统“方程式”中的一部分。所有的伺服系统,都需要在这几个方面相互平衡、折中、妥协:较高的惯量比,高动态性能的预期,柔性机械联接在任何系统中,以上这三点我们是无法同时做到的。
比如要让一个惯量比达到100:1或者更高的系统运转起来,如果系统刚性不佳,此时就需要降低系统响应频率(即增益值)-在性能上妥协;或者我们仍然需要有较高的动态特性,那么就不能允许在电机和负载之间有任何间隙和柔性的联接,例如:直接驱动电机,直线电机技术,使得电机和负载直接联接在一起,传动系几乎没有间隙,达到极高的刚性,此时即便有很高的惯量比,系统性能依然可以极高。
下面这张基于经验的趋势图表,定性的诠释了惯量比与系统刚性和动态性能之间的关系,或许可以为我们在实际应用的系统设计和选型,起到一定的参考作用。
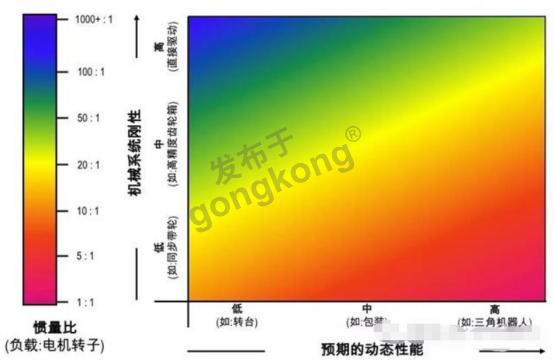
合适的惯量比主要取决于运动曲线有多么“激进”以及机械传动有多“硬”,不同的动态特性预期和传动刚性的差异,决定了特定运控系统所“适合”的惯量比。
一些速度较慢或者基本保持恒速运行的应用,如分度转台等,对惯量比要求并不苛刻,基本不要求个位数的惯量比,如果采用较好的刚性机械传动(如直接驱动电机),惯量比达到几百甚至上千有时也是可以接受的。
但对于那些高动态、高精度应用,比如:印刷的套准同步、三角机器人的高速抓取等,即使采用极佳的刚性传动,也不敢使用较大的惯量比(有时 10 都已经很大了);而如果传动刚性不足,那么可能 1:1 的惯量比都大了。
正如趋势图中所示,基于不同的动态和精度性能,根据不同的传动机构类型所带来系统刚性差异,可能的惯量比匹配范围还是很大的,是需要在实际具体的运控应用中,区别对待,具体情况,具体分析的。
任何抛开“运动性能”和“传动刚性”、只谈“惯量比”的做法都是不全面的。





楼主最近还看过

- 关于伺服编码器接线错误使编...
 [7949]
[7949] - 步进电机上电就有声音[8085]
- 什么是伺服驱动器,伺服电机?...[9380]
- 松下伺服驱动器MDDA103A1A说...[7575]
- 请教高手,伺服参数自整定?[9448]
- 如何计算负载惯性动量??[13429]
- 求助:怎样计算脉冲的移动量[5559]
- 求救:为什么伺服电机发烫?[8479]
- 电机的速度响应频率是什么意...[6176]
- 松下伺服的惯量比问题,请教!...[15687]

官方公众号

智造工程师
-

 客服
客服

-

 小程序
小程序

-

 公众号
公众号











 工控网智造工程师好文精选
工控网智造工程师好文精选
