Namisoft基于MSP430的电机功率因数测量系统 点击:479 | 回复:0

计算机技术,尤其是单片机技术和大规模集成电路及各种新型传感元件的迅速发展和日臻成熟,微机技术在电力系统中的普及应用,使电力系统的测量和监控技术得到了快速的发展。在工业生产过程中,往往需要对电动机运行期间的功率因数进行检测,以便采取相应的补偿措施来提高功率因数,从而达到节约电能的目的。若三相负载不平衡,为能比较真实地反映三相电机的功率因数值,可通过采样三相交流电中任意一相相电流以及另外两相线电压之间的相位差得到三相系统的功率因数。MSP430系列单片机是一种超低功耗的混合信号处理器(Mixed Signal Processor),它具有低电压、超低功耗、强大的处理能力、系统工作稳定、丰富的片内外设、方便开发等优点,具有很高的性价比,在工程控制等领域有着极其广泛的应用范围。使用MSP430实现对电机功率因数等电力参数的测量,不但提高了测量的精度和自动化水平,而且降低了系统的功耗。
1 功率因数与相位
电机的功率因数cosΦ值是相电压与相电流的余弦值。设三相的电压分别为UA,UB,UC,电流分别为IA,IB,IC,则它们的表达式如下:
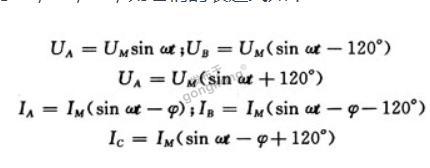
上式中:UM表示每相电压幅值;IM表示每相电流幅值;ω表示角频率;Φ表示相电流滞后相电压的相位差角。图1给出了三相输电线路的相电压、相电流的矢量图。
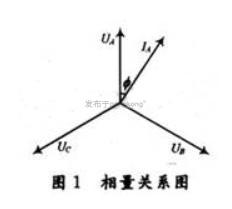
对于三相对称的电源,若电机的功率因数为1,即等效总负载为纯阻性,则各相电源的相电流必定与其相电压同相,相位差Φ=0°,而当电机的功率因数值不为1时,电流向量与电压向量之间将存在一定的夹角Φ,感性负载时Φ角滞后0°~90°,容性负载时角超前0°~-90°。因此准确检测线电压与线电流之间的相位差,即可测量出电机的功率因数角。
2 相位差Φ计算原理
相位差Φ的计算原理是利用输入2路信号过零点的时间差,以及信号的频率来计算2路信号的相位差。
2.1 频率的测量
首先测量单路输入信号频率,方法是记录1路方波信号2次连续上升沿触发的定时器计数值t1和t2,计算出2次上升沿计数器差值△t=t1-t2,以定时器工作频率fclk为参考,求出输入信号的频率为Fin=fclk/△N1。
2.2 信号相位差的测量
运用TI的MSP430F449的捕获功能,捕获2路信号的过零点,记录定时器这一时刻的计算值,计算出它们之间的时间差。TI公司的所有的FLASH型单片机都含有Timer_A,它是程序的核心。Timer_A由1个16位定时器和多路比较/捕获通道组成。
2路信号的相位差△=360°×△t/Ti,其中,△t=△N2/flk,△N2为2路信号的上升沿分别触发计数器的差值;Ti为输入信号的周期。由相位差的计算可简化为:
3系统硬件结构
测量系统以MSP430F449单片机为核心,主要由电压电流检测电路、信号调理电路、时钟电路、电源电路和显示电路组成。其系统结构图如图2所示。

3.1 电压、电流检测电路
为实现强、弱电的隔离,提高抗干扰能力,检测逆变器供电条件下的相电流以及两相的线电压,分别采用电流互感器和电压互感器。由于逆变器供电不平衡,造成三相交流电压、交流电流相位差不一致,影响功率因数测量的最终因数是相位,除频率变化造成的相位改变外,还有互感器的相差及交流采样时电流和电压不能同步采样造成的相差,这些因素造成的相差实际上是一个常数。
3.2 信号调理电路
电流互感器的输出,经运算放大器和I/V转换器,把电流信号转换成电压信号。电压信号和电流信号转化的电压信号进行放大、施密特整形,把交流信号转化为方波信号,输入到单片机Timer_A的TA1,TA2输入端。这样测信号相移就变成测信号边沿之间的时间宽度问题,MSP430F449单片机很容易实现。
3.3 时钟电路
时钟电路用于产生单片机工作所需的时钟信号,该系统采用内部时钟模块,外接晶振方式,振荡频率主要由石英晶振的频率决定。单片机内部具有时钟模块,能实现超低功耗应用。振荡器和系统时钟发生器的主要设计目标是廉价和低功耗。为达到系统廉价,外接器件缩减到只有一个普通晶振。在数字系统中,系统功耗与频率成正比,所以使用低频晶体和和含有倍频器的振荡器可以满足时钟系统速度与低功耗这2个要求。该系统的时钟电路是用一频率为32 768 Hz的晶振来固定整个电路的频率来实现。
3.4 显示电路
MSP430F449带有内部LCD驱动模块,直接将液晶显示屏连接在芯片的驱动端口即可,电路结构极为简单。LCD具有功耗低、体积小、质量轻、超薄和可编程驱动等其他显示无法比拟的优点。由点阵液晶显示器件与相应的控制器、驱动器装配成的显示模块的种类较多,其功能、指令、接口定义及引脚并无统一标准,具体使用时应加以选择。
4 软件设计
MSP430F449单片机内部具有多个时钟源,可以灵活地配置给各模块使用以及工作于多种低功耗模式,降低控制电路的功耗提高整体效率,其具有内部自带有高精度12为ADC12、一个集成LCD驱动模块、硬件乘法器以及Timer_A和Timer_B定时器等。
相电压和相电流的相位差Φ测量程序由主程序和中断程序组成。主程序完成各程控器件初始化、清零显示器、设定时钟频率等功能,然后进入低功耗模式,等待相位测量中断。中断服务程序完成频率、相位差的测量。其流程图如图3所示。
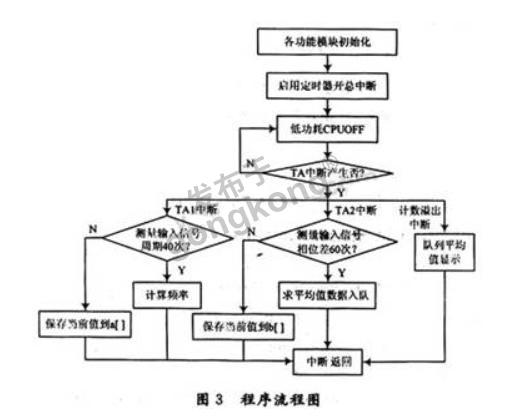
此系统的软件是采用C语言编写的,采用模块化程序设计。测量功能由中断完成的优点是使单片机绝大部分时间处于低功耗状态,充分发挥了MSP430系列单片机微功耗特点,降低了仪器的功耗。相位的测量需要对输入信号的周期和相位差值分别采样,周期的采样使用CCR0来捕获同一输入信号相邻的2个周期的上升沿,在第一个上升沿到来时触发CCR0中断,清零计数器并开始计数;当第二个上升沿到来时再次触发中断,保存计数值。为了防止中断冲突,提高测量的精度,采用滞后捕获的方法。即电流信号上升沿到来时,禁止CCR0,一直等到CCR2捕获到电流信号的上升沿为止,这时捕获到的2个上升沿不在同一个周期内,由于实测计数值和实际相位差计数值两者之间的差值为整数倍,从而能够得用已测到周期值算出2路信号相位差的实际计数值。为了提高测量的精废要求,可以在程序中使用长度为20的样本循环队列,而每个样本是40次周期采样和60次相位差采样的平均值。
5 结语
经实践证明,采用MsP430单片机技术对电机功率因数进行高精度测量,既可以改变传统的测量方法,同时又能实现电机功率因数的在线检测,对提高电机的运行,改善其性能起到一定的作用。由于采用测量单相电流及电压之间的相位差来得到三相系统的功率因数的检测方法,无需判断相序,可适用于不同的电机接线方法,在实际应用场合工作稳定可靠。MSP430F449单片机超低功耗存储量大,工作电压非常低,只要1.8~3.6 V即可以工作,十分适用于电池供电的工频数字相位测量。该测量系统的相位测量绝对误差≤2°,具有频率测量及数字显示功能;相位差数字显示的相位读数为0°~180.0°,分辨率为0.1°





楼主最近还看过
- 求教一个电磁抱闸的问题
 [10208]
[10208] - 星三角启动柜中的电阻有什么...[10533]
- 为什么我的星三角启动启动时...[27985]
- 请问相比电机三角形接法比星...[46418]
- 电工...警惕呀.....[56139]
- 离心式水泵扬程H、流量Q、转速...[21312]
- 明明是“变频交流电机”,为什么...[14439]
- 电工技术问答1000问[17837]
- 为什么制冷功率与耗电功率不...[11643]
- 兄弟们觉得电工上岗证有必要...[12771]

官方公众号

智造工程师
-

 客服
客服

-

 小程序
小程序

-

 公众号
公众号











 工控网智造工程师好文精选
工控网智造工程师好文精选
