安川机器人示教器上启动按钮的编程地址是多少? 点击:2570 | 回复:25








楼主最近还看过


引用 枫画 的回复内容: 是要启动灯信号有时输出一些给PLC吗
-------------------------
是的,我准备这样做:再现模式下按下启动按钮后,机器人做一个判断,如果判断收到了PLC发过来的允许运行信号,就正常启动运行;如果没有收到PLC发过来的允许运行信号,那么机器人不允许运行,并且同时给PLC输出一个信号。
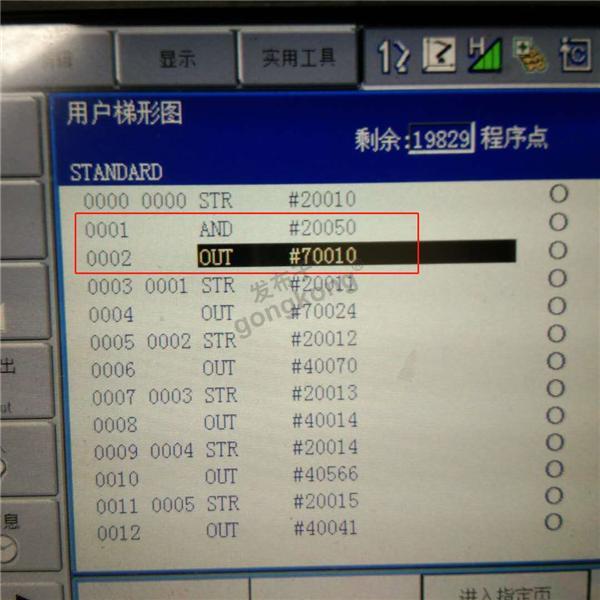
我需要这个启动按钮的输入地址,用这个地址做为判断条件的一部分。我准备在用户梯形图里面做,这样做的目的是无论客户运行哪一个子程序,都能实现我上面叙述的功能,而不必要在每做一个子程序时都加上这个功能,而且还能防止客户操作时误删除这个功能(因为做在用户梯形图里面,客户是需要密码才能进去的)。由于第一次接触安川机器人,摸索了几天了。
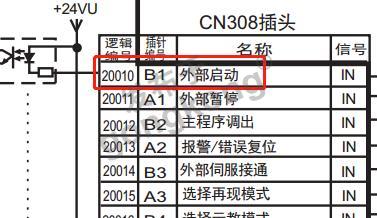
引用 手比脸白 的回复内容: 示教盒上的绿色启动按钮和外部端子排上的20010是关联...
-------------------------
你这个方法必须是外部启动才可以,经过我的实测,按下示教盒上启动按钮后,70010和40044都没有动作(这个我可以确定),那么可以确定示教盒上的启动按钮是通过其他地址来控制程序运行的。
当然用其它变通的方法我也可以实现目的,但是由于还有另外的一些功能要做,如果能知道示教盒上启动按钮的输入地址或者它控制的输出地址的话,我做起来就方便多了。
我问安川的经销商,已经把他逼得没办法了。不是我钻牛角尖,本着学习的态度,如果这次没弄懂,那么下次遇到了还是不会啊啊啊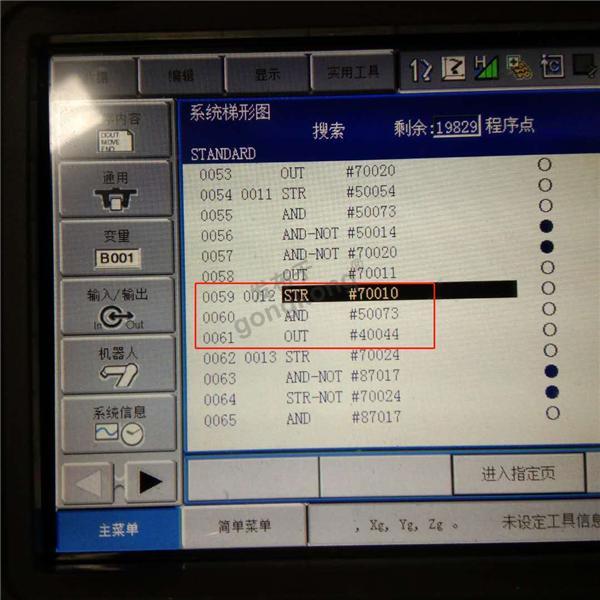
引用 手比脸白 的回复内容: 回复内容:对: 呼哈呼哈 引用 手比脸白 的回复内容...
----------------------
我现在是这样做的:
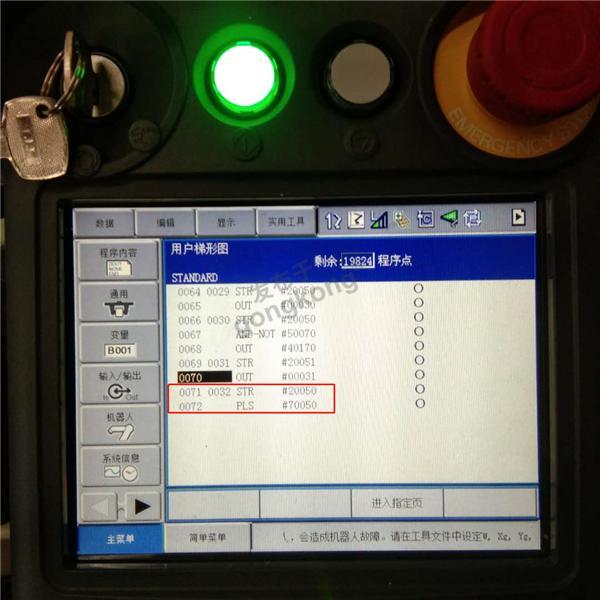
运行条件不满足机器人不能启动功能:我的设备有联动模式和调试模式,调试模式下机器人及其它配套设备互不关联,都能独立运行;联动模式下,如果运行条件不满足,PLC输出一个信号给机器人,为20051,那么示教盒红灯常亮,机器人不能启动。但是只要正常启动后就要求这个20051失效,所以我又ANI了50070,如下图。
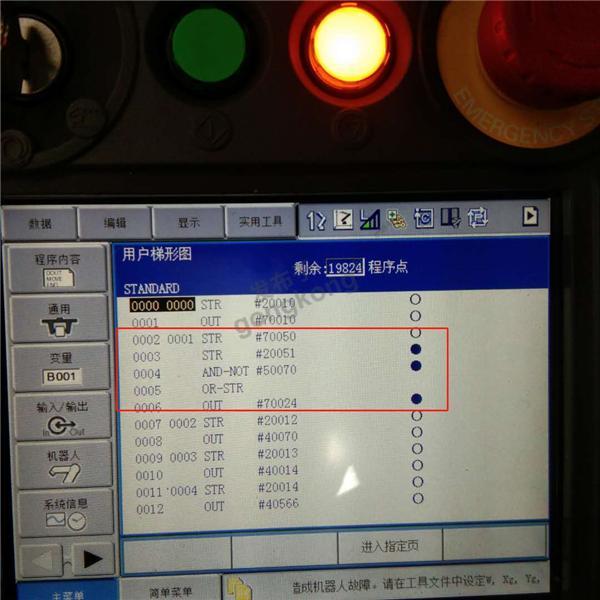
2.要求外围故障时PLC给机器人一个信号,要求机器人要嘛不理会故障继续自己的运行,要嘛回到作业原点。我发现如果要回到作业原点,必须要有一个停机的步骤,所以我用故障信号20050 PLS 70050 OUT 70024使机器人停止,STR 20050 ANI 50070 OUT 40170使机器人回到作业原点;
所以20050这个输入点如果接到PLC上,将执行外围故障时机器人回到作业原点;不接将执行外围故障时机器人继续运行不会停机;

你说的方法也是一种变通的方法,感觉应该也行,不过我不想试了,安川技术上班后打电话问问。感谢你们几位兄弟的积极回答,非常感谢!!!

- 现在机器人编程工程师工资多...
 [19281]
[19281] - 国产机器人控制系统说明书[1597]
- ABB机器人弧焊工作站软件配置...[1354]
- ABB机器人视频教程二[1141]
- 六轴机器人仿真软件,大家接触...[5730]
- 请问工业机器人中常用的电机...[2313]
- robotstudio6.03.01注册表修...[1198]
- 五轴水平多关节焊接机器人[1017]
- 工业机器人市场及发展趋势[1356]
- ABB机器人5轴监控触发是什么...[5272]

官方公众号

智造工程师
-

 客服
客服

-

 小程序
小程序

-

 公众号
公众号











 工控网智造工程师好文精选
工控网智造工程师好文精选
