利用传动比实现伺服电机的惯量匹配 点击:1024 | 回复:48

发表于:2012-12-21 11:47:40
楼主
利用传动比实现伺服电机的惯量匹配
刘志斌
1、在电机拖动系统中,电机的转动惯量与负载的转动惯量没有必然的联系;
2、大多数情况下电机的转动惯量总是小于负载的转动惯量;
3、如何实现电机的转动惯量与负载的转动惯量的匹配?
4、利用传动比可以实现电机与负载的惯量匹配:
电机的惯量×α=负载的惯量/传动比的平方
传动比的平方=负载惯量/电机惯量×α
5、所以传动比就是实现电机惯量与负载惯量匹配的“变换器”;
6、所以传动比是否合适,以系统是否实现惯量匹配为标准!
7、α为伺服惯量JM是负载惯量JL的倍数,α增大时系统惯量中伺服惯量JM的比例减小,系统加速度提高;







发表于:2012-12-21 23:52:20
11楼
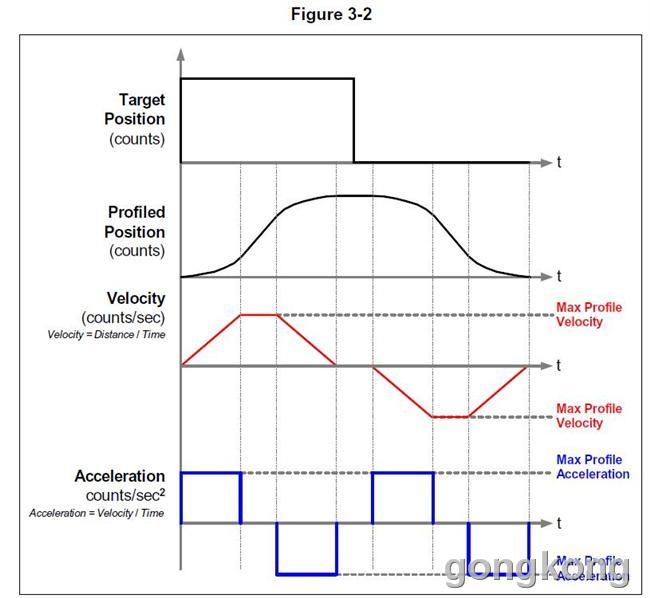
“1、Target Position (counts) 指令位置脉冲数” 为位置环给定脉冲数;
“2、Profiled Position (counts) 位置环输出的脉冲数”,可以理解为编码器检测反馈脉冲数;为位置环计数端反馈脉冲数/ 电子齿轮比;
“3、Velocity (counts/sec) 速度(脉冲数/秒,脉冲频率)”,伺服的速度=编码器检测反馈脉冲频率;为速度环检测反馈速度;
“4、Acceleration (counts/sec^2) 加速度(脉冲数/秒平方,脉冲频率的变化率)”,伺服的加速度=编码器检测反馈脉冲频率的变化率;为电流环(转矩环)检测反馈电流参数;
发表于:2012-12-22 11:44:27
13楼
热门招聘
相关主题
- 关于插补周期
 [5438]
[5438] - 伺服电机的位置锁定是如何实...[8778]
- PID位置环,速度环,电流环控制...[17570]
- 对伺服的整体疑问(高手请进_...[6691]
- plc与伺服交流电机的连接问题...[11182]
- 运动控制器中的电子凸轮实现...[7905]
- 直流电机的UVW相[9831]
- Windows系统下的实时性问题[8045]
- 长点知识, 学点双闭环控制吧...[13953]
- 求助:埃斯顿伺服与台达伺服的...[8322]

官方公众号

智造工程师
-

 客服
客服

-

 小程序
小程序

-

 公众号
公众号











 工控网智造工程师好文精选
工控网智造工程师好文精选
