F1伺服控制系统是世界上动态控制性能最好的 点击:3452 | 回复:53

 正在下载,请等待……
正在下载,请等待……







以下对之前关注F1伺服,以及怀疑甚至盲目否定F1伺服的各位同行做个统一声明:
对各位的质疑我们是执欢迎态度的,这也是对F1伺服性能的一个考验。但是质疑之前,请先确认你做过带10.6×10-4kg.m2惯量的电机测试或者是15ms内转速上升1000rpm的测试实验,其动态性能又如何?可否也给我们见识一下? 或者你认为我们没有调出安川的最佳性能,那么口说无凭,你们调出安川更好的性能出来咱们可以先对比、探讨一下各自对安川伺服系统的理解和性能调整方法。要是你没有这些工作经验的话,那么你的质疑就是对别人的一种误导。这样对自身言行极不负责任的人没有得到制止,工控网又怎么能真正成为工控人交流、学习的乐土呢?
我们也非常、非常欢迎对F1伺服的性能执怀疑态度的各位同行组织业内或者工控网的高手、专家 拿你们回帖中提到的号称动态性能超过F1伺服的国内、外几大品牌来与F1伺服做对比测试。就当下国人的心态而论,很多人不敢相信、不能接受 中国人有自主研发出世界领先的技术和产品的能力,是多年积淀的自卑心理作祟?还是国内的科研、研发环境使然?
你们也可以联合起来,把你们的能力发挥到极致,调出一套你们自认为最佳性能的伺服系统和F1伺服进行对比;或者由你们指定任何权威的第三方测试机构进行更加客观的测评;对于测试结论,可请第三方权威、公正人士或者机构做一公证,为解除你们的怀疑,公证方可由你们指定。
你可以认为这是F1伺服摆下的擂台,如果你对世界上动态控制性能最好的F1伺服控制系统依然是怀疑的,那么何不也弄一套你认为最好的伺服控制系统来PK一下?
回复内容:
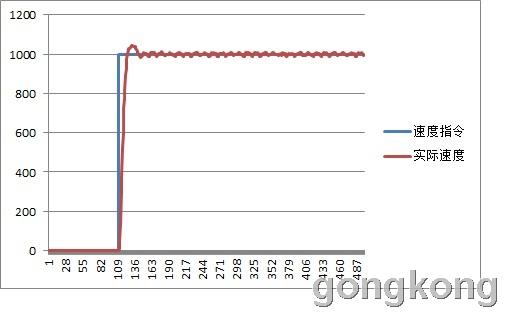
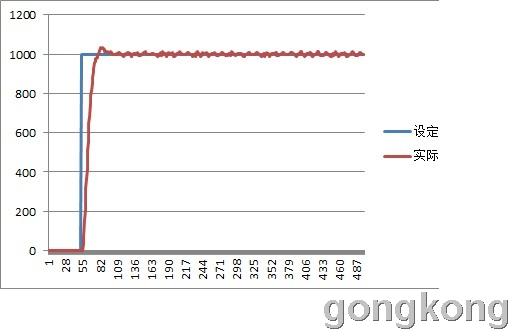
对:永远爱祖国关于再多说一点,我为什么要问动态跟踪误差,速度的稳定当然是很重要,但在高端设备中动态跟踪误差的影响非常重要,特别是在多轴联动中,这个不用专业知识,逻辑分析就能想象的到。从楼上的速度曲线上可以看出一点,在上升沿动态跟踪误差会相当大,应该只是在1000以上,从上升沿可以想象的到下降沿。所以最好的数据是同时给出同一次测试中的速度曲线和动态跟踪误差 内容的回复:
对精度要求很高的, 大部分有上位数控系统进行轨迹规划, 伺服一般运行在速度环, 甚至电流环下。关于高精度插补等问题,我跟一个资深的数控系统专家讨论过, 也算略知一点吧。
即便对于多轴联动, 也是需要上位系统的,上位系统的指令都是斜坡等处理过的, 不会直接发阶跃信号的。
完全靠驱动器位置环的联动只能满足要求不高的应用。
我上面的图是纯粹运行在速度环下的最快响应,实际中受到机械系统的带宽等限制,都会加入一下斜坡、滤波等环节,调整到系统的响应带宽在机械设备的带宽以内, 避免机械共振等。
- 开发伺服系统 求助
 [6434]
[6434] - 请教步进电机驱动器的接入电...[15183]
- 伺服电机能不能不用PLC控制?[9586]
- PLC能够直接与伺服电机相连接...[10161]
- 求助:埃斯顿伺服与台达伺服的...[8322]
- 关于位置环PID和速度环PID的...[7195]
- 伺服电机零位漂移的原因?出现...[12619]
- 光栅尺与驱动器接线[7465]
- 伺服电机的低速性能和转速-扭...[13332]
- 关于飞剪系统[7548]

官方公众号

智造工程师
-

 客服
客服

-

 小程序
小程序

-

 公众号
公众号











 工控网智造工程师好文精选
工控网智造工程师好文精选
