实验机器人“小强一号”制作过程 点击:3338 | 回复:72

从对机器人感兴趣开始,买了一堆书,也看了很多资料,决定先从最简单的车轮机器人开始做。普通电脑虽然强大,但是不能直接采集外界环境的物理数据,也不能直接控制电机。查找了下,虽然可以直接在电脑上接USB接口的数据采集器用于采集传感器的数据,也可以使用PCI的电机控制卡来驱动各种电机,不过成本有些高,暂时不考虑了。找了一圈,发现还是单片机方案廉价,顺便可以学习下单片机控制和作一些电路实验。于是最终决定实验方案采用单片机来做了。
零件
下面是采购的零件:
8位单片机Atmega168开发板(Arduino)。价格为$35美圆
Arduino是源自意大利的一个开放源代码的硬件项目,该平台包括一片具备简单I/O功效的电路板以及一套程式开发环境软体。Arduino可以用来开发可独立运作、并具互动性的电子用品,或者也可以开发出与PC相连的週边装置,同时能在运作时与PC上的软体进行沟通。 Arduino的硬体电路板可以自行焊接组装成,也可以购买已经组装好的,而整合开发环境的软体则可以自网路上免费下载与使用。目前Arduino的硬体部分支援Atmel的ATmega8与ATmega168等微控器。 此外,Arduino专案获得2006年Prix Art Electronica在电子通讯类方面的荣誉奖。 Arduino的硬体电路参考设计部分是以创用(Creative Commons;CC)形式提供授权。相应的原理图和电路图都可以从Arduino网站上获得.





楼主最近还看过







【url=】代码:
int ledPin = 13; // LED connected to digital pin 13void setup(){ pinMode(ledPin, OUTPUT); // sets the digital pin as output}void loop(){ digitalWrite(ledPin, HIGH); // sets the LED on delay(1000); // waits for a second digitalWrite(ledPin, LOW); // sets the LED off delay(1000); // waits for a second}
以间隔1000ms的时间把单片机的第13 个Pin脚循环输出高低电平,从而达到点亮和熄灭LED功能。很简单,就是验证下单片机是否可用。


最后,电压差的正负输出到电机驱动芯片决定电机的正反转。当电机转速一定时,通过级联减速齿轮带动 电位器旋转,使得电压差为0,电机停止转动。
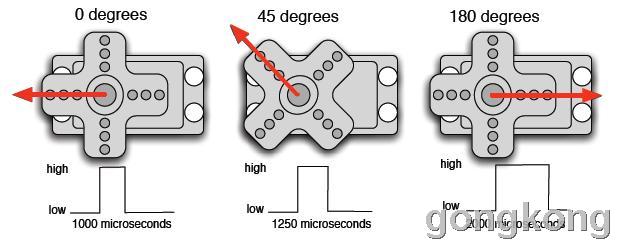
在程序中控制舵机的转动角度,就是生成不同脉宽的PWM就行了。

上面的代码简单的生成一个PWM 驱动舵机旋转,比较简单。 代码中用delay来实现延时,如果是同时控制多个舵机,用这样的代码是不行的,需要自己计算时间。因为用delay整个单片机都“休息”了,无法执行任何代码。在实际实现中,还需要不断的读取传感器输入和进行其他处理。
传感器介绍:
SHARP红外距离传感器,用于模型或机器人制作,可以用来测量距离。每个模块赠送一根15cm长PH2.0的单头排线.
技术规格:
探测距离:10-80cm
工作电压:4-5.5V
标准电流消耗:33-50 mA
输出量:模拟量输出,输出电压和探测距离成比例

int ledPin = 13;
int val = 0;
void setup() {
pinMode(ledPin, OUTPUT);
}
void loop() {
val = analogRead(potPin);
digitalWrite(ledPin, HIGH);
delay(val);
digitalWrite(ledPin, LOW);
delay(val);
}
运行结果,led随着传感器距离的变化闪烁间隔也随着变化。
控制电机
常用的直流电机使用L293D来控制,使用H293的电路如下:



直接把电机接到单片机的Gnd和 PWM Pin 9接口,然后在程序中直接向 Pin 9输出就可以让电机运转了。
int value = 0;int ledpin = 9;
void setup()
{
// nothing for setup
}
void loop()
{
for(value = 0 ; value <= 255; value+=5)
{
analogWrite(ledpin, value);
delay(30);
}
for(value = 255; value >=0; value-=5)
{
analogWrite(ledpin, value);
delay(30);
}
}
上面的程序用不同的输出值驱动电机,可以看到电机的旋转效果。单片机和主要部件的验证基本就完成了,下一步要开始程序设计了。
对于程序员来说,机器人无非就是外接了物理传感输入和运动控制输出的一台电脑,不管是64位多核CPU或者8位单片机,只是性能的不同而已。理论上,都能通过程序设计来达到预定的目标。如果按照计算机上的普通程序来设计,那么大量的功能代码会相互耦合,每次为了增加一个新的运动功能或者任务,都需要编制新的代码,而新的代码给原来的环路反馈系统带来新的逻辑分支,所有的步骤都得经过程序员的验证和设计。这样的设计对于精确计算的PC程序或者擅长固定场景精确动作的工业机器人来说,都没有问题。但是对于这里要实现的“小强一号”机器人,是处在一个动态的变化环境当中,如果按照传统的软件设计逻辑,会存在大量耦合的逻辑分支,导致程序扩展性很差。举例来说,为了完成一个沿墙壁行走的功能,必须对各种传感器输入情况进行判断,然后做出预置的动作序列。

换一种思维来思考的话,我们要做的不是电脑程序,只是一个实验机器人。这个实验机器人能做到自然界昆虫级的“智能”就很不错了。 试想,一只蚂蚁,一只蟑螂会去思考这么复杂的逻辑分支吗?去考虑各种情况下应该采取的动作? 不太可能。我们用了复杂的想法去解决简单的事情。
机器人和计算机的主要区别在于,计算机是按照预先规划的指令运行,而机器人需要根据变化的环境选择合适动作。我们首先可以简化动作模型,我把机器人的执行任务分成3个层次:任务-》行为-》动作
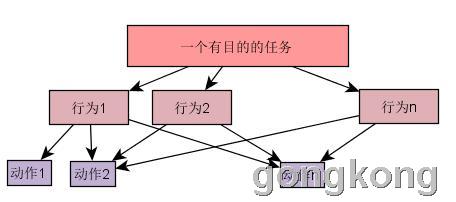
行为——行为是对任务的分解,行为是机器人根据环境变化选择要做什么。比如碰到墙壁需要进行躲避。电源不足需要充电,就可以划分为一个行为。
动作——机器人最终控制电机等输出设备做出的动作,比如前进,后退,转弯。转动摄像头都可以划分成一个动作单元。
说明:任务由一系列的行为构成;行为有一个或者多个动作组成,动作是立即执行的最小单元。在任意一个时刻,只有一个动作可以得到执行。
软件实现的对象就是分解出简单的行为,针对每个行为单独实现,互相之间无干涉、无耦合。当多个行为要输出互相矛盾的动作时,通过一个行为优先级表来决定优先级高的行为来做出动作。在这个思路中,参考了基于行为编程的理论,关于详细的基于行为编程的描述,可以在网上搜索“Behavior-based robotics”。
通过这种设计思路,可以实现对动物反射特性的模拟,不需要把精力放在复杂的逻辑处理上,只需要根据分解出的基本行为实现一个一个小的行为单元。每个行为单元只关心自己的传感输入和需要输出的控制动作就行了。确定了设计思路,下一部分开始针对小强一号来设计软件了。

下面的代码是“巡航”行为:
class BhCruis:public Behavior{
public: BhCruis(const char* name):Behavior(name){ };
BhCruis();
void Run();
void Setup();
};
void BhCruis::Setup()
{
}
void BhCruis::Run()
{
int bid = GetId();
GO_speed_left【bid】 = 255;
GO_speed_right【bid】 = 255;
GT_beh_action【ACTION_TYPE_MOTOR】【bid】 = true;
}
上面的代码很简单,就是让两个电机以同样的速度晕装,其他都不用考虑。对于某些行为,需要引入稍微复杂一些的处理,比如发现障碍物,首先要停下来,然后判断是应该往左还是往右,做出决定之后,再进行具体的动作。针对这种不能在一个时刻完成,要经过几个不同的状态才能处理完成的行为,可以用状态机来解决。下图是“逃离”行为的状态机:

- (已结束)工控PLC擂台第18期-...
 [10980]
[10980] - 求教:PLC运行灯不亮,一般会是...[19214]
- 可编程控制器视频教程免费下...[10227]
- 接近开关与PLC问答[7285]
- 就关于西门子PLC严重的质量问...[9950]
- OMRON PLC的引脚上的NC与COM...[11867]
- 为什么我装的三菱PLC编程软件...[9911]
- 继电器输出型PLC,驱动一交流...[8103]
- 西门子S7-200CN梯形图注释[8420]
- 有关工控的网址汇总[25094]

官方公众号

智造工程师
-

 客服
客服

-

 小程序
小程序

-

 公众号
公众号











 工控网智造工程师好文精选
工控网智造工程师好文精选
