ABB机器人安装流程及拆包流程 点击:1814 | 回复:0

ABB工业机器人拆包装的操作
①.ABB机器人到达现场后,第 一时间检查外观是否有破 损,是否有进水等等异常 情况。如果有问题请马上 联系厂家及物流公司进行处理。
ABB机器人拆包
②.使用合适的工具剪断箱子上的两条钢扎带。

ABB工业机器人拆包装的操作
③.将剪断的钢扎带取走。
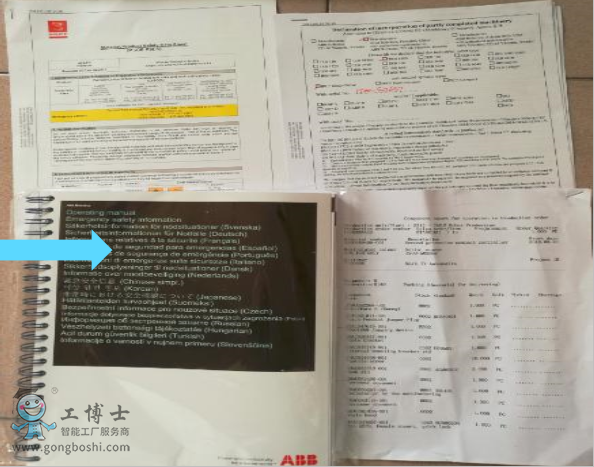
ABB工业机器人清点标准装箱物品
①.以ABB机器人IRB1200 为例,包括4个主要物品: 机器人本体、示教器、线缆 配件及控制柜
②.两个纸箱打开后,展开 的内容物
③.随机的文档:SMB电池 安全说明、出厂清单、基本 操作说明书和装箱单。
ABB机器人本体与控制柜安装
①.将控制柜从底座上安放 到机器人工作台下面去。
②.使用扳手拆掉将机器人 固定在底座上的螺丝。一共 有4枚
③.将ABB机器人安装到机器人 工作台,并且坚固到机器人本体底盘上的4颗螺丝。然 后,将固定机器人姿态的支架拆卸

ABB机器人本体与控制柜电气连接
①.ABB机器人本体与控制柜之 间需要连接三条电缆: A:动力电缆 B:SMB电缆 C:示教器电缆
②.将动力电缆标注为XP1 的插头接入控制柜,如图所示。
③.将动力电缆标为R1.MP 的插头接入机器人本体底座 的插头上,如图所示
④.将SMB电缆(直头)接 头插入到控制柜XS2端口
⑤.将SMB电缆(弯头)接 头插入到机器人本体底座 SMB端口
⑥.将示教器电缆(红色) 的接头插入到控制柜XS4端 口
⑦.此项目中IRB1200是使 用单相220V供电,*大功 率0.5kw。根据此参数,准 备电源线并且制作控制柜端 的接头。
⑧.将电源线根据定义进行 接线,一定要将电线涂锡后 插入接头压紧
⑨.已制作好的电源线如图 所示
⑩.在检查后,将电源接头 插入控制柜XP0端口并锁紧。
.将示教器支架安装到合 适的位置,然后将示教器说 放好。
更多ABB机器人技术支持请点击:http://abb_robots.gongboshi.com/
ABB机器人信息请点击:ABB机器人
 正在下载,请等待……
正在下载,请等待……







- 伺服电机那个控制系数怎么得...
 [1817]
[1817] - 同学们发新书了——不要抢都有...[2778]
- 如何解决ABB机器人使用ATI换...[3822]
- SVGN-370 发那科机器人报警代...[1255]
- 库卡机器人走圆弧轨迹问题[2468]
- 机器人教程[4942]
- 菜鸟拙技—智能浇花机器人的设...[4391]
- 机器人本体点检项目表[1127]
- ABB视觉系统[2109]
- 求助安川机器人本体颜色色号[1143]

官方公众号

智造工程师
-

 客服
客服

-

 小程序
小程序

-

 公众号
公众号











 工控网智造工程师好文精选
工控网智造工程师好文精选
