LabVIEW FPGA开发实时滑动摩擦系统 点击:37 | 回复:0

LabVIEW FPGA开发实时滑动摩擦系统
由于非线性摩擦效应的建模和补偿的固有困难,摩擦系统的运动控制已被广泛研究。最近,人们更加关注滑动动力学和滑动定位,作为传统机器人定位的低成本和更灵活的驱动替代方案。摩擦控制器设计和适当选择基础摩擦模型的问题很重要。同样重要的是,要认识到摩擦是一种时变现象,并且会随着磨损或污染物引入系统而发生巨大变化。因此,有必要能够连续量化系统的摩擦状态,以提供最佳的运动控制。
这项工作提出了一种用于滑动的实时摩擦识别方案,该方案通过专用的实时运动控制系统实现,该系统利用DSP进行运动控制,FPGA进行力数据收集和分析。
应用是通过推动元件的等速驱动在旋转板上以环为中心。
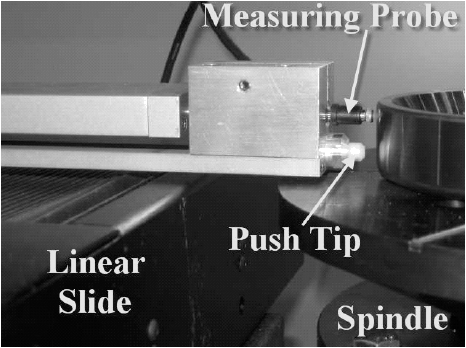
测量探头命令线性滑块伺服跟随,并收集数据以表征环表面。通过最小二乘技术对数据进行建模,然后从模型中提取偏移距离和方向等参数。这些参数被定向到运动控制子程序,该子程序以恒定速度驱动滑块,以使推头使零件几何中心与旋转中心直线移动。当零件被驱动时,从推头中的压电传感器收集力数据。中心对齐的目标公差为2.5μ米.
系统利用PXI-8187RT控制器、PXI-7350RT运动控制模块和PXI-7831 RFPGA模块。PXI-7350RT使用板载Motorola68331浮点处理器和板载数字信号处理器(DSP)进行8轴运动控制。由于高可用采样率,FPGA用于力传感器数据采集,并使用LabVIEW FPGA软件模块进行编程。所有硬件组件都集成在一个通用的PXI机箱中。
系统摩擦状态很少是恒定的。滑动表面的磨损、固体和液体污染物进出系统的运输以及零件居中状况的变化都会给摩擦模型带来变化。为了捕捉这些效应,描述了基础摩擦模型参数的实时识别方案。主要摩擦模型参数的识别使用对数递减法进行处理。在这项工作中,通过反演一般动力学模型来识别每次驱动达到的峰值力和实现的自由滑动距离。通过这种方式,单个驱动可以提供来自不同来源的摩擦估计。
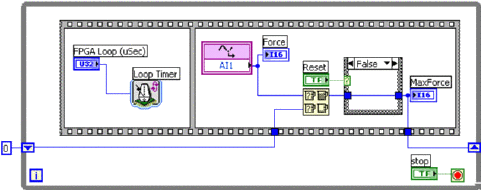
力感测通过压电感测元件实现,该元件的输出被放大并定向到PXI实时系统机箱中安装的FPGA PXI-7831R卡的模拟输入(AI)端口。力捕获通过FPGA AI捕获进行。
摩擦预测器模型中使用的自由距离由数字线性测量探头量化,该探头创建分辨率为20nm的正交编码器信号。探头输出从致动力传感器读取的失去接触点捕获,直到零件停止滑动。探头输出被引导至DSP模块的数字编码器输入。
观测力的一阶摩擦预测器和观测到的自由滑动距离的二阶摩擦预测器。此外,还定义了导数加权组合方案。识别方案预测给定应用中的滑动摩擦在5%以内。
这种摩擦识别方法还具有系统建模和运动控制路径规划之外的影响。此外,实时摩擦识别可用作机器诊断评估的一个要素。通过检测系统摩擦状态的重大变化来监控机器运行状况,并提供后续生成的维护请求或警报条件。
厂家没有提供LabVIEW的例子。根据通讯协议的相关的说明,编写了适合项目的程序。程序截图如下所示。
相关资料说明,如下所示。
LabVIEW程序,如下附件所示。





楼主最近还看过
- 原创:电脑攻防——Windows XP ...
 [2333]
[2333] - WINCC项目文件拷贝步骤[4363]
- 组态王的售后服务不错[1997]
- 求助:VB与s5-100PLC的通信[1968]
- sql 2000sp3/sp4 for wincc ...[3839]
- 免费送出专业电气绘图软件PC...[2379]
- 求助:web下组态界面的实现(j...[2035]
- 用组态王收发短信的最好方法[2454]
- 求助:组态王风扇旋转动画[2596]
- 施耐德软件任你拿[5143]

官方公众号

智造工程师
-

 客服
客服

-

 小程序
小程序

-

 公众号
公众号











 工控网智造工程师好文精选
工控网智造工程师好文精选
